عمليات ثني المعادن: المعدات والمعلمات واستكشاف الأعطال وإصلاحها
كيف تتحول الصفائح المسطحة إلى أجزاء منحنية؟ ثني المعادن هو المفتاح. تكشف هذه المقالة النقاب عن الأدوات والتقنيات والحيل وراء...
كيف تتقن الروبوتات الصناعية الدقة والتنوع؟ في هذه المقالة، نستكشف المكونات والآليات المعقدة لهذه الأعاجيب الهندسية. من المعالجات القوية إلى أنظمة القيادة المتطورة، اكتشف كيف تؤدي الروبوتات المهام المعقدة بدقة ملحوظة. ستتعرف على بنية الأذرع الروبوتية ووظائف المفاصل المختلفة والتقنيات الكامنة وراء حركاتها. تعمّق في فهم الهندسة الكامنة وراء هذه الأدوات التي لا غنى عنها في التصنيع الحديث.

تتألف أنظمة الروبوتات الصناعية بشكل عام من أربعة أجزاء: المعالج (الجسم)، والبيئة، والمهام، ووحدة التحكم، كما هو موضح في الشكل 1.
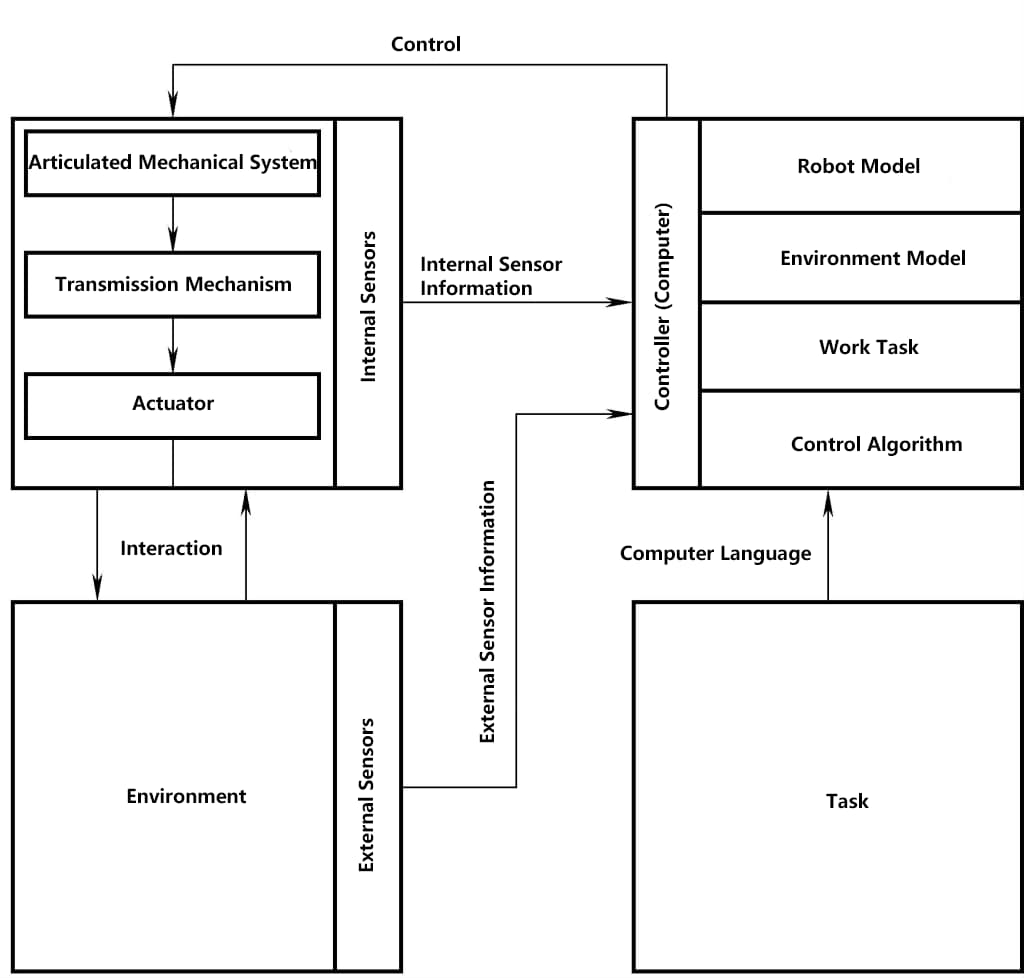
تشير البيئة إلى بيئة عمل الروبوت، بما في ذلك جسم العمل وبعض العوائق. يجب أن يمنع الروبوت التداخل مع هذه الأجسام أثناء حركته.
تشير المهمة إلى العمل الذي يحتاج الروبوت إلى إكماله، مثل اللحام أو الطلاء أو المناولة وما إلى ذلك. يمكن تعريفها عادةً على أنها الفرق بين حالتين من البيئة، ويجب وصفها وتخزينها في وحدة تحكم الروبوت بلغة أو برامج مناسبة.
تُستخدم وحدة التحكم لتلقي المعلومات التي تكتشفها المستشعرات الداخلية والخارجية للروبوت ومعالجتها وتوليد إشارات تحكم وفقاً لبرنامج تحكم معين، مما يؤدي إلى تحريك المفاصل المختلفة لجسم الروبوت، وبالتالي إنجاز المهمة المحددة. جسم الروبوت هو الآلية الميكانيكية التي تؤدي المهمة، ويتكون من مجموعة من آليات الحركة المترابطة بما في ذلك الأذرع والمفاصل والمستجيبات الطرفية.
في الهندسة العملية، يُعرف جسم الروبوت أيضًا باسم المعالج أو الذراع الآلية أو اليد الميكانيكية وما إلى ذلك. معظم أجسام الروبوتات عبارة عن هياكل ميكانيكية مفصلية مع عدة درجات من الحرية. روبوتات اللحام عادةً ما يكون لها 6 درجات من الحرية، 3 منها توجه الأداة الطرفية إلى الموضع المطلوب، وتستخدم الدرجات الثلاث الأخرى للتحكم في وضع الأداة.
بالمعنى الواسع، يمكن اعتبار آليات الروبوت بشكل عام نوع القضيب الآلية، بما في ذلك أجزاء مثل الذراعين والمعصمين والمخالب وآليات المشي. بالنسبة لروبوتات اللحام، يشمل هيكل جسمها بشكل أساسي أجزاء الذراع والمعصم.
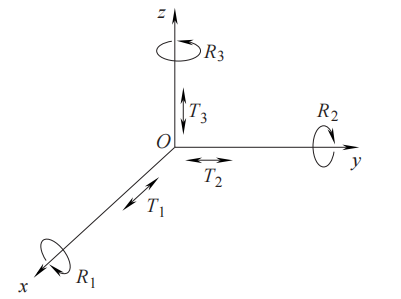
بالنسبة للجسم الجاسئ الحر، لديه 6 درجات من الحرية في الفضاء الثلاثي الأبعاد، كما هو موضح في الشكل 2. لإكمال أي عملية مكانية، يحتاج الروبوت أيضاً إلى 6 درجات من الحرية.
حركة الروبوت عبارة عن مزيج من حركات الذراع والمعصم. عادةً ما يحتوي جزء الذراع على 3 مفاصل، والتي تُستخدم لتغيير موضع النقطة المرجعية للمعصم، وتسمى آلية تحديد الموضع؛ ويحتوي جزء المعصم أيضًا على 3 مفاصل، وعادةً ما تتقاطع هذه المحاور الثلاثة المشتركة، وتستخدم لتغيير وضع الأداة النهائية، وتسمى آلية التوجيه. لذلك، يمكن النظر إلى الروبوت بأكمله على أنه آلية تحديد المواقع المتصلة بآلية التوجيه.
إن ذراع الروبوت هو الجزء الذي يقوم بالعملية بشكل مباشر، وسيؤثر هيكله بشكل كبير على قدرة الروبوت. بشكل عام، يتألف الذراع من قضبان ومفاصل (أزواج حركية) تربط بينها. يحتوي المفصل على درجة أو عدة درجات من الحرية.
ما يسمى بدرجة الحرية هو مؤشر على مرونة حركة الروبوت، أي عدد الحركات الفردية المستقلة. وتسمى درجات الحرية التي يمكن أن تنتج حركة نشطة بواسطة المشغل درجات الحرية النشطة، وتلك التي لا يمكن أن تنتج قوة دافعة تسمى درجات الحرية السلبية. يوضح الجدول 1 الرموز واتجاهات الحركة للمفاصل التمثيلية ذات درجة الحرية الواحدة.
الجدول 1 مفاصل الحرية الأحادية الدرجة الواحدة
| الاسم | الرمز | مثال على ذلك |
| الترجمة | 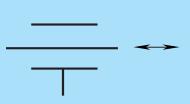 | 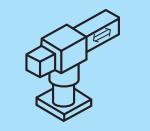 |
| التناوب | 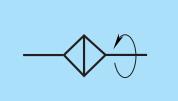 |  |
| الدوران ① | 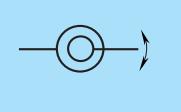 | 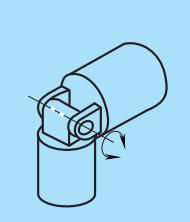 |
| الدوران ② | 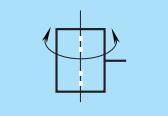 |
يمكن تقسيم طرق بناء الأعضاء والمفاصل إلى نوعين تقريبًا. من المنظور العام للذراع، تكون الأعضاء والمفاصل التي يتكون منها الذراع متصلة بشكل متسلسل، وتُعرف باسم روبوتات الأعضاء المتسلسلة أو الروبوتات ذات السلسلة المفتوحة، بينما تسمى تلك المتصلة بشكل متوازي روبوتات الأعضاء المتوازية أو الروبوتات ذات السلسلة المغلقة. في الشكل 3، أمثلة على درجات حرية الأيدي الروبوتية ذات الأعضاء المتسلسلة والمتوازية. في الواقع، معظم الأيدي الروبوتية من نوع الأعضاء المتسلسلة.
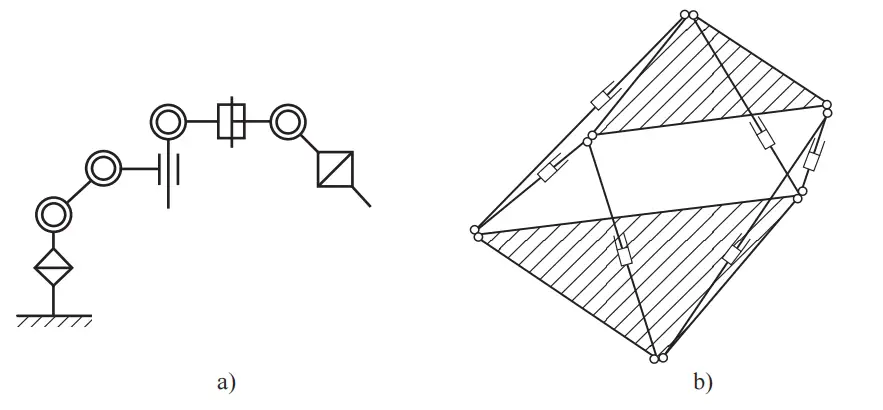
أ) نوع العضو المتسلسل
ب) نوع العضو الموازي
وتؤثر طريقة بناء درجات الحرية بشكل كبير على نطاق حركة الروبوت وقابلية تشغيله، من بين أداءات أخرى. على سبيل المثال، المفصل الكروي هو مفصل ثلاثي درجات الحرية يمكن أن يتحرك في أي اتجاه، ويمكنه بسهولة تحديد الوضع المناسب للمهمة. ومع ذلك، نظرًا لقيود المشغل، من الصعب تحقيق هذه الوظيفة بشكل كامل. ولذلك، عادةً ما تربط الروبوتات عادةً ثلاث آليات أحادية الدرجة من الحرية في سلسلة لتحقيق هذه الدرجات الثلاث من الحرية.
باستخدام مثل هذا التسلسل طريقة التوصيل، حتى مع وجود نفس درجات الحرية الثلاث، هناك العديد من التوليفات المختلفة لدرجات الحرية، ولكل منها وظائف مختلفة.
على سبيل المثال، هناك العديد من طرق البناء المحددة لآلية معصم ذات 3 درجات من الحرية. مع الأخذ في الاعتبار شروط وجود درجات حرية انتقالية ودورانية على المحاور x و y و z، إذا لم يكن هناك إزاحة بين الوصلات المتجاورة، وكانت محاور المفاصل المتجاورة إما متعامدة أو موازية لبعضها البعض، فهناك ما مجموعه 63 نوعًا. بالإضافة إلى ذلك، مع تضمين ثلاث درجات من الدوران، فإن الذراع ذات 6 درجات من الحرية لديها ما يصل إلى 909 طرق لبناء درجات الحرية.
لذلك، من الضروري تحديد الطريقة الفعالة لبناء درجات الحرية بناءً على معايير مثل متطلبات العملية المستهدفة.
الغرض الرئيسي من الذراع هو التموضع في فضاء ثلاثي الأبعاد، وكما ذكرنا سابقًا، من الضروري وجود ثلاث درجات من الحرية. إذا أخذنا في الاعتبار الجمع بين درجات الحرية الانتقالية والدورانية والدورانية والدورانية، فهناك ما مجموعه 27 طريقة لبناء درجات الحرية. ومع ذلك، استنادًا إلى شكل الحركة، يمكن تقسيم الطرق التمثيلية لبناء درجات الحرية إلى الأنواع الأربعة التالية:
يتألف الروبوت من النوع الإحداثي الأسطواني، الذي يظهر في الشكل 4، من مزيج من دوران واحد وانتقالين؛ أما الروبوت من النوع الإحداثي الكروي، الذي يظهر في الشكل 5، فيتكون من مزيج من الدوران والدوران والانتقال.
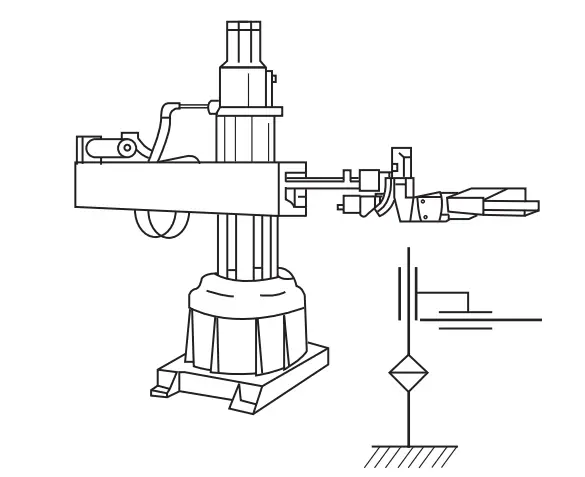
يتمتع هذان النوعان من الروبوتات بدرجة حرية دوران مركزية، وكلاهما يتمتعان بمدى كبير من الحركة، وحسابات الإحداثيات الخاصة بهما بسيطة نسبيًا. أول روبوت عملي في العالم الروبوتات الصناعيةو"Versatran" و"Unimate"، اعتمدت آليات إحداثيات أسطوانية وكروية على التوالي.
يتمتع الروبوت من نوع الإحداثيات الديكارتية (كما هو موضح في الشكل 6) بدرجات حرية مستقلة على طول المحاور س، ص، ض، مع بنية بسيطة ودقة عالية وحساب إحداثيات بسيط للغاية والتحكم فيها. ومع ذلك، فإن نطاق حركته ليس واسعًا، مما يجعل من الصعب تحقيق إجراءات عالية السرعة.
يتألف الروبوت المفصلي بشكل أساسي من درجات الحرية الدورانية والدورانية، والتي يمكن اعتبارها هيكلًا يحاكي ذراع الإنسان، مع هيكل مفصل رابط له مفصل مرفق. في هذه الحالة، يُطلق على الجزء الممتد من المرفق إلى الكتف اسم الذراع العلوي، والجزء الممتد من المرفق إلى المعصم اسم الساعد. هذا الهيكل هو الأكثر فعالية لتحديد أي موضع ووضعية في الفضاء ثلاثي الأبعاد. وهو يتمتع بقدرة جيدة على التكيف مع مختلف المهام، ولكن عيبه هو أن حساب الإحداثيات والتحكم فيها معقد نسبيًا، ومن الصعب تحقيق دقة عالية.
يمكن تقسيم الروبوت المفصلي، بناءً على طريقة بنائه لدرجات الحرية، إلى عدة فئات.
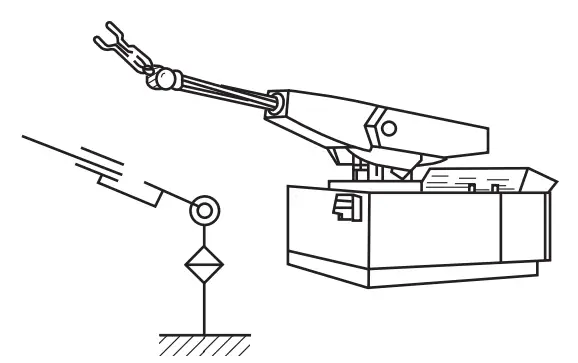
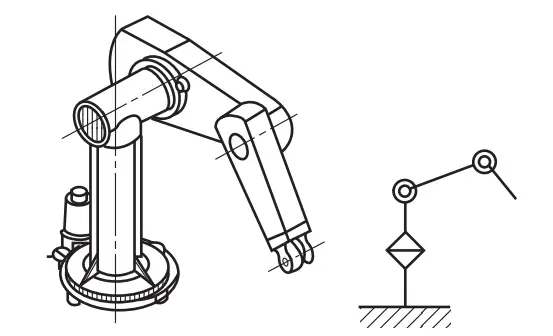
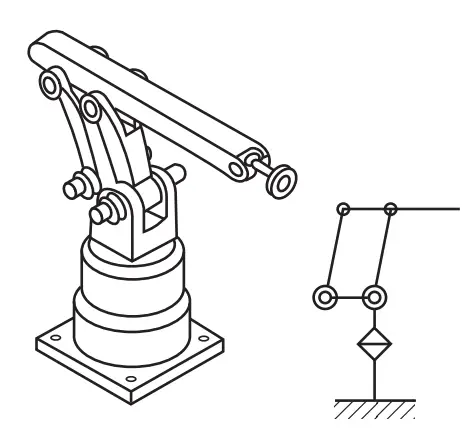
الشكل 7 هو الذراع العام الذي يعتمد هيكل الدوران والدوران ودرجات حرية الدوران والدوران. يستخدم الذراع في الشكل 8 وصلة متوازية الأضلاع ويثبت المشغل المستخدم لقيادة المفصل في قاعدة الذراع.
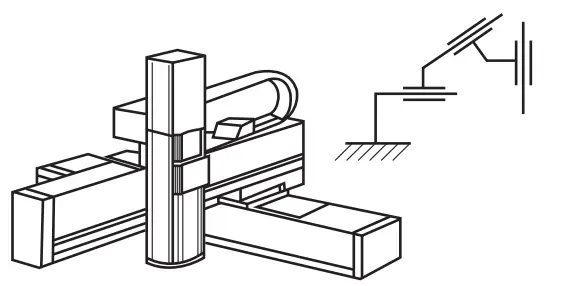
يُطلق على الشكل 9 اسم الروبوت SCARA (ذراع روبوت التجميع الانتقائي للامتثال)، ويعتمد الهيكل الأمامي للذراع على درجات الحرية التي يمكن أن تتحرك بشكل تعسفي داخل مستوى ثنائي الأبعاد، لذلك فهي تتميز بخصائص الصلابة العالية في الاتجاه الرأسي والصلابة المنخفضة (الامتثال) في الاتجاه الأفقي.
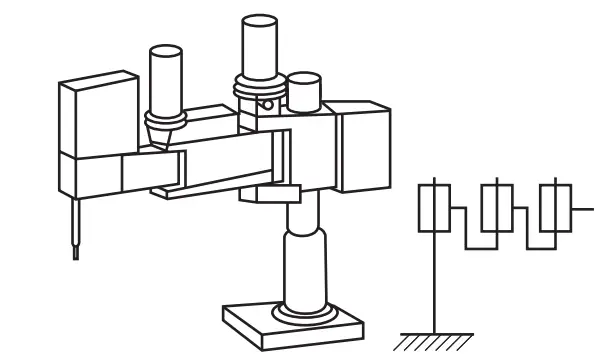
ومع ذلك، في التشغيل الفعلي، لا يرجع السبب الرئيسي في ذلك إلى خاصية الامتثال الخاصة التي يمتلكها، ولكن لأنه يمكن أن يحقق إجراءات على مستوى ثنائي الأبعاد بشكل أكثر بساطة، وبالتالي فهو يستخدم على نطاق واسع في عمليات التجميع.
معصم الروبوت هو الجزء الواصل بين الذراع والأداة الطرفية، ويُستخدم لتغيير موضع الأداة واتجاهها في الفضاء. بنية المعصم معقدة بشكل عام، وتؤثر بشكل مباشر على مهارة الروبوت. يتكون المعصم الأكثر شيوعًا من محورين أو ثلاثة محاور مفصلية متعامدة بشكل متبادل، حيث يكون المفصل الأول من المعصم هو المفصل الرابع للروبوت.
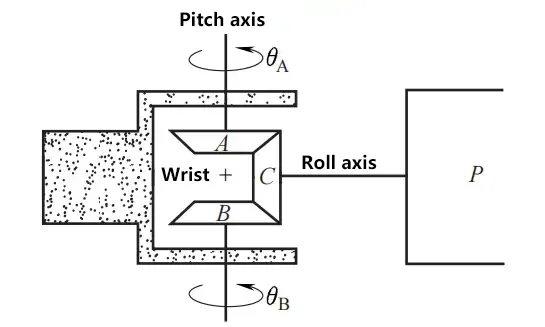
الشكل 10 عبارة عن معصم كروي بسيط ذو لفة كروية. تشكِّل ثلاثة تروس مخروطية مخروطية A وB وC آلية تفاضلية، حيث يتم توصيل التروس A وB بمحركي دفع عبر سلسلة أو سير نقل، باستخدام فرق السرعة واتجاه دوران التروس A وB لتجميع اتجاه دوران الأداة وسرعتها.
يوضّح الشكل 11 مخططاً تخطيطياً ومخطط نقل لرسغ حر بـ3 درجات، مع ثلاثة محاور متعامدة على بعضها البعض ومتقاطعة عند نقطة واحدة. نظرياً، يمكن لهذا المعصم أن يحقق أي وضعية، ولكن نظراً للقيود الهيكلية على زوايا المفاصل، لا يمكنه تحقيق أي وضعية. هذا النوع من المعصم هو الشكل الأكثر شيوعاً في الروبوتات.
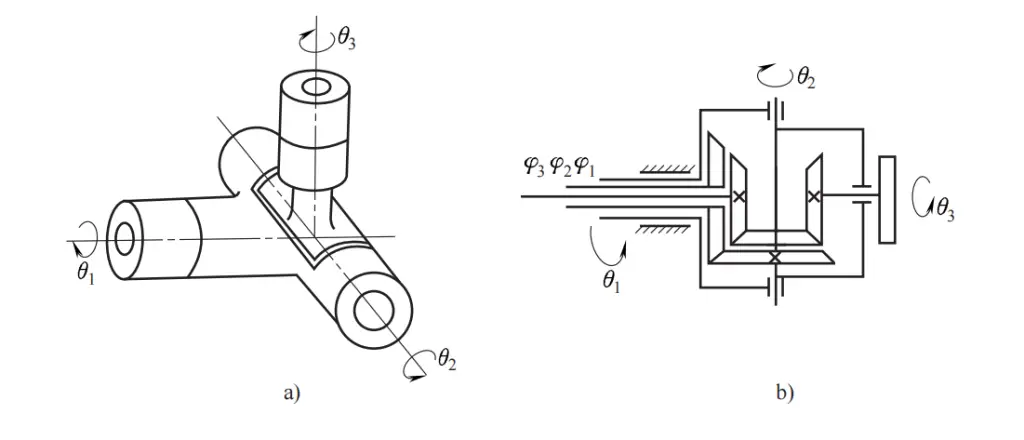
أ) رسم تخطيطي
ب) مخطط الإرسال
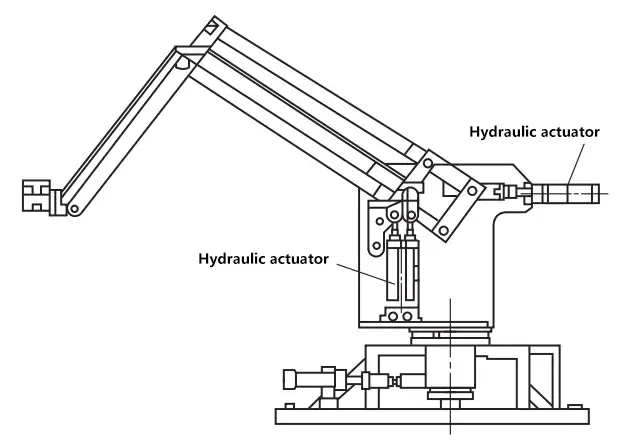
تنقسم المحركات الرئيسية للروبوتات إلى محرك هيدروليكي، ومحرك هوائي، ومحرك كهربائي، إلخ.
الميزة الرئيسية للمحرك الهيدروليكي هي قوته العالية، وهيكله البسيط، والتخلص من ترس التخفيض، والاتصال المباشر بالقضيب المدفوع، والاستجابة السريعة. يتمتع محرك المؤازرة الهيدروليكي بدقة عالية، ولكنه يتطلب مصدرًا هيدروليكيًا إضافيًا، وهو عرضة لتسرب السوائل، وبالتالي يستخدم المحرك الهيدروليكي في الغالب في أنظمة الروبوتات ذات الطاقة العالية جدًا.
تتمتع المشغلات الهوائية بمصادر طاقة وهياكل بسيطة، ولكن بالمقارنة مع المشغلات الهيدروليكية، فإن قدرتها أقل في ظل نفس ظروف الحجم (بسبب انخفاض الضغط)، وسرعتها ليس من السهل التحكم فيها، لذلك فهي تستخدم في الغالب في أنظمة التحكم في النقاط منخفضة الدقة.
المشغلات الكهربائية هي المشغلات الأكثر استخدامًا في الوقت الحاضر. لديها مصادر طاقة بسيطة، ونطاق واسع من تغيرات السرعة، وكفاءة عالية، وسرعة عالية ودقة عالية في تحديد الموقع، ولكنها غالبًا ما تكون متصلة بتروس تخفيض، مما يجعل القيادة المباشرة صعبة. يمكن تقسيم المشغلات الكهربائية إلى تيار مستمر، ومحرك محرك سيرفو تيار متردد، ومحرك محرك متدرج.
هذا الأخير هو في الغالب تحكم مفتوح الحلقة، تحكم بسيط ولكن ليس عالي الطاقة، ويستخدم في الغالب في أنظمة الروبوتات منخفضة الدقة ومنخفضة الطاقة. تتمتع المحركات المؤازرة بالتيار المستمر بالعديد من المزايا، ولكن فرشها عرضة للتآكل ويمكن أن تشكل شرارات بسهولة. مع التقدم التكنولوجي، حلت محركات مؤازرة التيار المتردد تدريجياً محل محركات مؤازرة التيار المستمر كمشغلات رئيسية في الروبوتات في السنوات الأخيرة.
تتميز المحركات المؤازرة للتيار المستمر بقصور دوراني صغير، واستجابة سريعة لبدء التشغيل والتوقف، ونطاق واسع من تغيرات السرعة، وكفاءة عالية، وسرعة عالية ودقة عالية في التحكم في السرعة والموضع.
تتميز محركات مؤازرة التيار المستمر بالعديد من المزايا ونسبة عالية من حيث التكلفة إلى الأداء، حيث إنها دائمًا ما تكون المحرك القياسي لمنصات الروبوتات. ومع ذلك، فإن فرشها عرضة للتآكل ويمكن أن تشكل شرارات بسهولة. وبالتالي، تم تطوير محركات بدون فرش، باستخدام دوائر هول للتبديل.
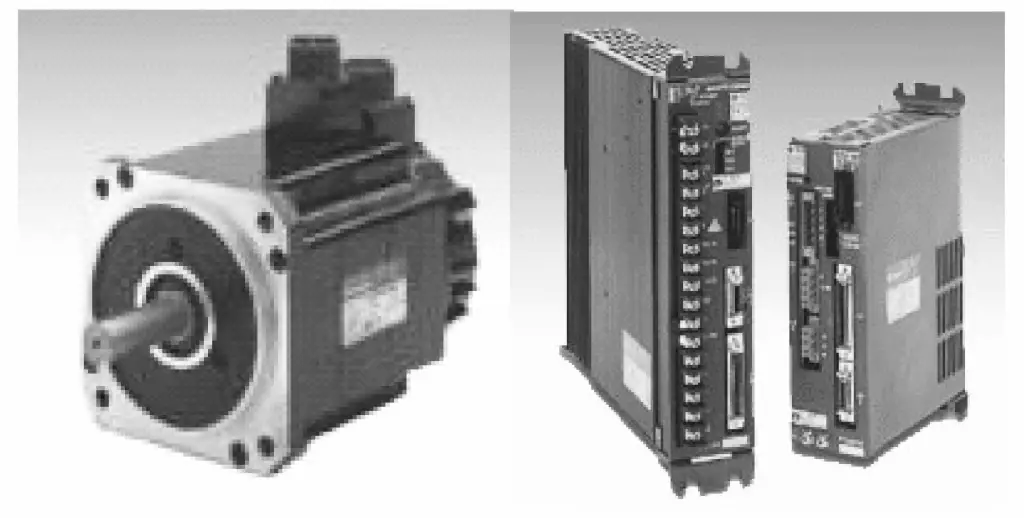
يوضح الشكل 12 محرك سيرفو تيار مستمر ومضخم محرك.

تتمتع المحركات المؤازرة بالتيار المتردد بقدرة أعلى من المحركات المؤازرة بالتيار المستمر، ولا تحتاج إلى فرش، كما أنها ذات كفاءة عالية، ويسهل صيانتها، وهي الأكثر استخدامًا في الروبوتات الصناعية. يوضّح الشكل 13 محرك سيرفو تيار متردد ومضخم محرك.
تتشابه المعلمات التقنية الرئيسية للمحركات المؤازرة بالتيار المتردد مع تلك الخاصة بمحركات التيار المستمر.
المحركات السائر هي نوع من المحركات بدون فرش، مع مغناطيسات مثبتة على الدوار وملفات مثبتة على الغلاف. المحركات السائر هي في الأساس محركات منخفضة السرعة، يسهل التحكم بها، وقادرة على القيام بحركات دقيقة، مع سرعة تشغيل مثالية تبلغ 50 ~ 100 لفة/دقيقة. يوضح الشكل 14 محرك السائر والسائق.

إن محركات المحركات السائر هي في الغالب ذات حلقة تحكم مفتوحة، سهلة التحكم ولكنها ليست قوية، مع تأثيرات كبح جيدة، ولكنها قد تواجه فقدان الخطوة عند السرعات المنخفضة جدًا أو تحت الأحمال الثقيلة، وغالبًا ما تستخدم في الأنظمة الروبوتية منخفضة الدقة ومنخفضة الطاقة.
هناك نوعان من طرق القيادة المشتركة: القيادة المباشرة والقيادة غير المباشرة. تقوم طريقة الدفع المباشر بتوصيل عمود الخرج الخاص بالمحرك مباشرةً بمحور مفصل ذراع الروبوت. تنقل طريقة القيادة غير المباشرة قوة المحرك إلى المفصل من خلال مخفض أو فولاذ حبل سلكي، الحزام، الوصلة المتوازية، إلخ.
وتتمثل ميزة القيادة المباشرة في وجود عدد أقل من الأنظمة الميكانيكية بين المحرك والمفصل، مما يقلل من تأثير العوامل غير الخطية مثل الاحتكاك، مما يؤدي إلى أداء تحكم أفضل. ومع ذلك، من ناحية أخرى، من أجل قيادة مفصل الذراع مباشرة، يجب أن يكون عزم الدوران الناتج للسائق كبيرًا جدًا، بالإضافة إلى ذلك، يجب مراعاة ديناميكيات الذراع.
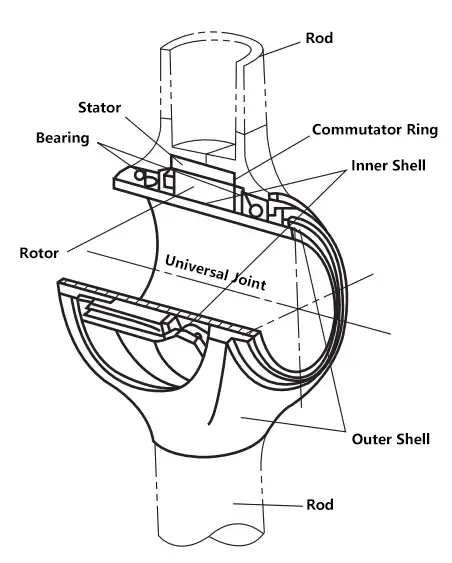
يمكن لمحرك عزم الدوران الذي تم تطويره في الثمانينيات، والذي يتكون نظامه الميكانيكي بشكل أساسي من محامل، أن يحقق قدرة قيادة عكسية ممتازة (قيادة عمود الخرج للسائق من جانب المفصل). ويرد مثال على هيكل مفصل يستخدم محرك عزم الدوران للقيادة المباشرة في الشكل 15. تسمى الروبوتات التي تستخدم طرق القيادة المباشرة هذه عادةً روبوتات القيادة المباشرة (روبوتات القيادة المباشرة).
يتم تشغيل معظم وصلات الروبوت بشكل غير مباشر. بالنسبة لهذا النوع من المحرك غير المباشر، عادةً ما يكون عزم الدوران الناتج للمشغل أقل بكثير من عزم الدوران المطلوب لقيادة المفصل، لذلك يجب استخدام مخفض.
وبالإضافة إلى ذلك، نظرًا لأن الذراع يعتمد بشكل عام على هيكل شعاع ناتئ، فإن موضع تركيب المحرك الذي يقود مفصل الروبوت متعدد درجات الحرية سيزيد من الحمل على محرك المفصل الجذري للذراع. يمكن حل هذه المشكلة عادةً باستخدام آليات القيادة البسيطة التالية.
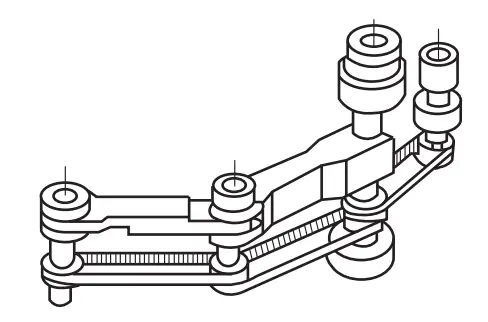
تضع هذه الطريقة أيضًا السائق بعيدًا عن المفصل، كإحدى وسائل القيادة عن بُعد. تتمتع السلاسل والأحزمة الفولاذية بصلابة جيدة ويمكنها نقل عزم دوران كبير، وغالبًا ما تستخدم في الروبوتات من نوع SCARA. تظهر طريقة القيادة بالحزام المسنن في الشكل 16.
ميزة هذه الطريقة هي أنه يمكن تثبيت برنامج التشغيل في قاعدة الذراع، وهذه البنية تجعل حساب التحويل الإحداثي بسيطًا للغاية، ويوضح مثال على ذلك في الشكل 17.
كما ذكرنا سابقًا، في عملية قيادة مفاصل الروبوتات بالمحركات الكهربائية، مع الأخذ في الاعتبار عزم دوران القيادة ودقة التحكم، يلزم بشكل عام وجود آلية اختزال. تشمل آليات الاختزال الشائعة المستخدمة في الروبوتات مخفضات التوافقي ومخفضات العجلة الحلزونية الدائرية الدائرية RV، كما يتم استخدام ناقل الحركة الحلزوني في بعض الروبوتات في النقل الخطي.
يشتمل مخفض المحرك التوافقي على ثلاثة مكونات أساسية: مولد الموجة، والمرنسبلاين، والشريط الدائري، كما هو موضح في الشكل 18. ويمكن أن يكون أي من المكونات الثلاثة ثابتًا، على أن يكون المكونان الآخران نشطًا وسلبيًا، ويمكن أن يحقق الاختزال أو التسارع، أو يمكن استخدامه كمدخلين ومخرج واحد، مما يشكل ناقل حركة تفاضلي. يوضح الشكل 19 هيكلاً تخطيطياً لمخفض المحرك التوافقي.
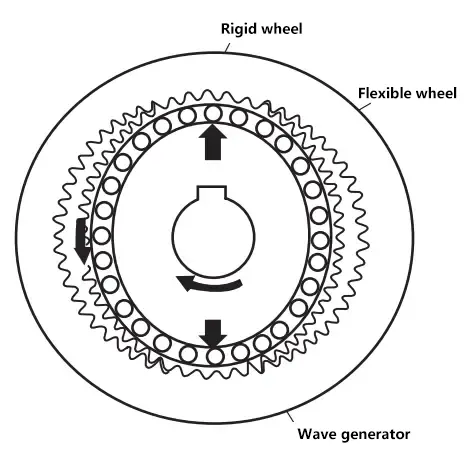
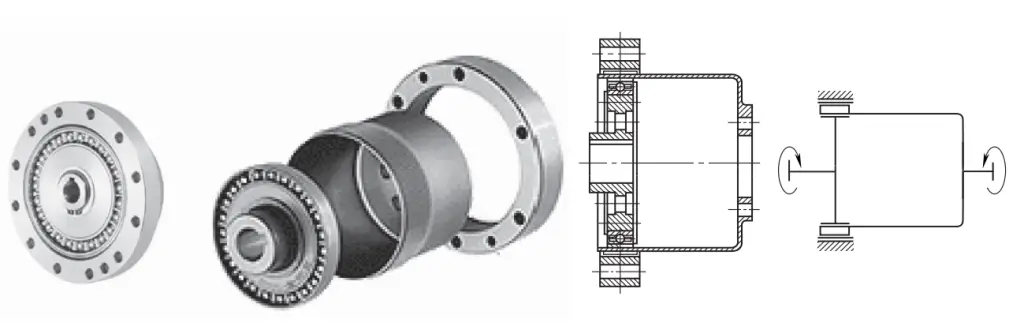
يظهر مبدأ عمل مخفض المحرك التوافقي في الشكل 20. عندما يكون الشريحة الدائرية ثابتة، ويكون مولد الموجة نشطًا، ويكون الخط المرن غير نشط، يتشوه الخط المرن تحت تأثير مولد الموجة الإهليلجي، حيث تتشابك أسنان الخط المرن على طرفي المحور الرئيسي لمولد الموجة بالكامل مع أسنان الشريحة الدائرية.
عند طرفي المحور الأصغر لمولِّد الموجة تنفصل أسنان الخط المرن تمامًا عن أسنان الشريحة الدائرية؛ وعلى جانبي المحور الرئيسي الإهليلجي، تكون أسنان الخط المرن وأسنان الشريحة الدائرية في حالة تشابك جزئي. على جانب دوران المحور الرئيسي في الاتجاه الموجب، تسمى منطقة التشبيك؛ وعلى جانب دوران المحور الرئيسي في الاتجاه المعاكس، تسمى منطقة فك الارتباط.
ونظرًا للدوران المستمر لمولد الموجة، تتغير الحالات الأربع للتشابك والتعشيق الكامل وفك الارتباط وفك الارتباط الكامل وفك الارتباط الكامل بالتتابع، حيث تدور بشكل مستمر. ونظرًا لأن الخط المرن يحتوي على عدد قليل من الأسنان (عادةً 2 أو 4) أقل من الخط الدائري، فعندما يدور مولد الموجة دورة واحدة، يدور الخط المرن بزاوية أسنان قليلة في الاتجاه المعاكس، وبالتالي يحقق نسبة تخفيض كبيرة.
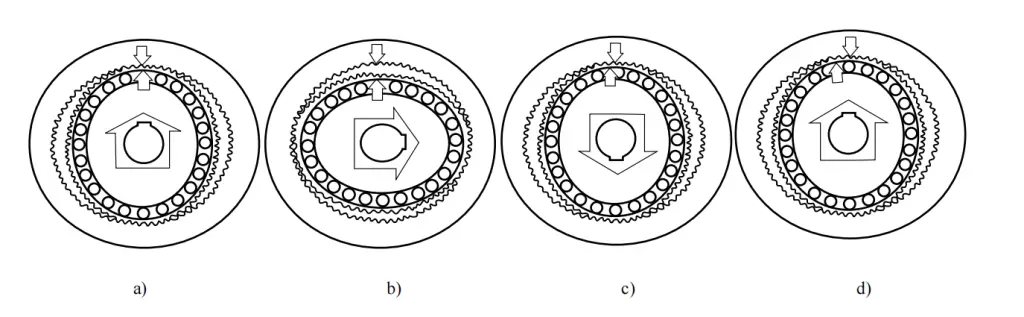
a)0°
b)90°
c)180°
d)360°
بالمقارنة مع ناقل الحركة التوافقي العام، يتميز ناقل الحركة التوافقي بالميزات الرئيسية التالية:
نظرًا لأن العديد من الأسنان تعمل في ناقل الحركة في نفس الوقت، فإن ناقل الحركة يكون سلسًا وسعة التحميل عالية. وفي ظل ظروف العمل نفسها، يمكن تقليل الحجم بمقدار 20%~50%.
إذا تم اختيار معلمات التشبيك بشكل صحيح، تكون سرعة الانزلاق النسبية لأسطح الأسنان منخفضة جدًا، مما يؤدي إلى الحد الأدنى من التآكل والكفاءة العالية. عندما يكون الهيكل معقولاً والتشحيم جيداً، يمكن أن تصل الكفاءة η في ناقل الحركة مع i=100 إلى 0.85؛ أما في ناقل الحركة مع i=75، يمكن أن تصل الكفاءة η إلى 0.92.
وبنفس دقة التصنيع، يمكن أن تكون دقة ناقل الحركة التوافقي أعلى بمستوى واحد من دقة ناقل الحركة العادي. إذا كانت أسطح الأسنان مطحونة جيدًا، فإن دقة النقل التوافقي محرك التروس يمكن أن يكون أعلى بأربعة أضعاف من ناقل الحركة العادي.
يمكن أن يكون رد الفعل العكسي للمحرك التوافقي الدقيق عمومًا أقل من 3′ ~ 1′، ويمكن تحقيق نقل خالٍ من رد الفعل العكسي.
عند استخدام ناقل حركة ثابت مرن من نوع الكوب الطويل، يمكن نقل الحركة في صندوق مغلق، وهو أمر يصعب تحقيقه مع آليات النقل الأخرى.
استنادًا إلى الخصائص المذكورة أعلاه لمخفضات التوافقيات، فإنها تستخدم على نطاق واسع في نقل مفاصل الروبوت، وغالبًا ما تكون بمثابة جهاز التباطؤ والنقل لمفاصل معصم الروبوت.
يتكون جهاز النقل الحلزوني الحلزوني الدائري RV من مجموعة تروس كوكبية أحادية المرحلة متبوعة بمخفض تروس حلزوني حلزوني أحادي المرحلة، كما هو موضح في الشكل 21.
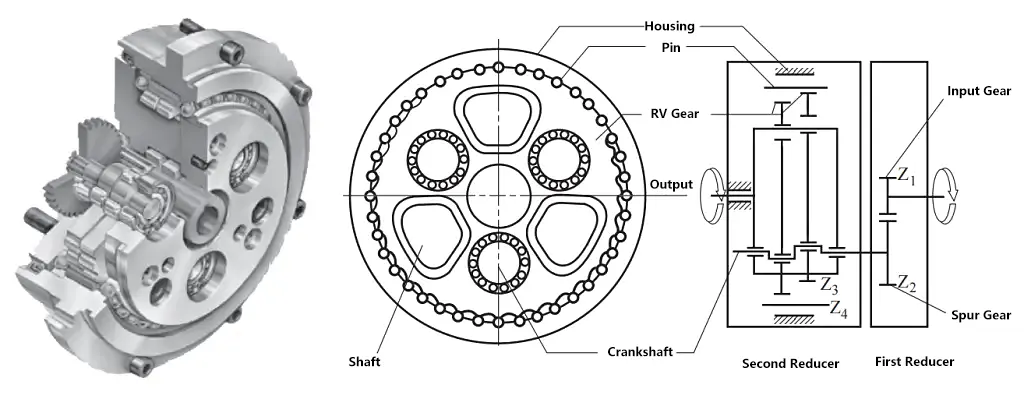
يحتوي على عمود إدخال، والذي يحرك 2 إلى 3 تروس كوكبية موزعة حول المحيط من خلال ترس على العمود. يتم توصيل كل ترس كوكبي بعمود غريب الأطوار ثنائي الاتجاه، والذي بدوره يدفع ترسين دائرين دائرين متقابلين شعاعيًا متقابلين شعاعيًا للدوران على الغلاف الثابت بأسنان داخلية. ثم تدفع العجلات الدائرية بعد ذلك عمود إخراج القرص للدوران من خلال 2 إلى 3 أعمدة مسمارية غير أسطوانية موزعة حول المحيط.
وبالمقارنة مع المحرك التوافقي، فإن المحرك الحلزوني الدائري الدائري RV، بالإضافة إلى امتلاكه نفس خصائص نسبة السرعة العالية، والنقل المحوري، والهيكل المدمج، والكفاءة العالية، فإن أهم ما يميزه هو الصلابة الجيدة والقصور الذاتي الدوراني الصغير.
بالمقارنة مع أجهزة الدفع التوافقي المنتجة في اليابان والمستخدمة في الروبوتات، في ظل نفس ظروف عزم الدوران الناتج والسرعة ونسبة التخفيض، فإن حجم كلاهما متساوٍ تقريبًا، ولكن صلابة ناقل الحركة الأخير أكبر بمقدار 2 ~ 6 مرات. عند تحويله إلى عمود الإدخال، يكون القصور الذاتي الدوراني أصغر بأكثر من مرتبة من حيث الحجم، ولكن الوزن زاد بمقدار 1 إلى 3 مرات.
والسبب في الوزن الإجمالي الكبير والقصور الذاتي الدوراني لعزم دوران عمود الإدخال الصغير بشكل خاص هو أن جهاز نقل الحركة الدوارة يضيف مرحلة من النقل الكوكبي، مما يسمح بتحويل عمود الإدخال والتروس إلى أسطوانة ليست كبيرة جدًا، بينما الأجزاء الدوارة في الخلف، على الرغم من ثقلها، فإن القصور الذاتي الدوراني الذي يتم تحويله إلى عمود الإدخال يصبح صغيرًا جدًا بعد مرحلة من الاختزال.
نظرًا للصلابة العالية، والقصور الذاتي الدوراني الصغير، والوزن الكبير نسبيًا، فإن هذا المخفض مناسب بشكل خاص للمرحلة الأولى من مفصل الدوران (مفصل الخصر) للروبوتات، حيث يقع الوزن الذاتي الكبير على القاعدة، وتلعب الصلابة العالية والقصور الذاتي الدوراني الصغير أدوارها بالكامل.
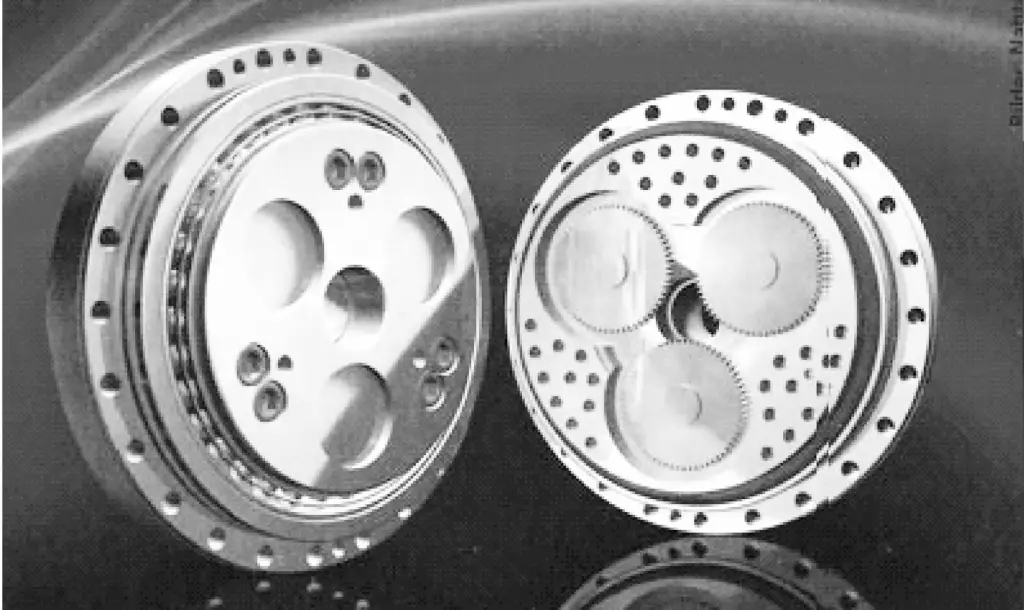
يمكن للصلابة العالية أن تزيد بشكل كبير من التردد الطبيعي للماكينة بأكملها، مما يقلل من الاهتزاز؛ ويمكن أن يؤدي القصور الذاتي الدوراني الصغير إلى تحسين سرعة الاستجابة وتقليل استهلاك الطاقة أثناء التسارع والتباطؤ المتكرر. يوضح الشكل 22 صورة حقيقية لمخفض RV.
يمكن للنقل الحلزوني المتداول تحقيق التحويل بين الحركة الدورانية والحركة الخطية. يتضمن هيكلها وضع كرات مناسبة بين البرغي ذي الأخاديد الحلزونية والصامولة، وتغيير الاحتكاك المنزلق بين البرغي والصامولة إلى احتكاك متدحرج، وهو نوع من النقل الحلزوني، كما هو موضح في الشكل 23. يحتوي كل من البرغي 1 والصامولة 3 على أخاديد حلزونية ذات أسطح على شكل قوس، ويشكل تجميعهما معًا مجرى حلزوني، مع وجود كرة 4 تدور وتتدحرج فيه.
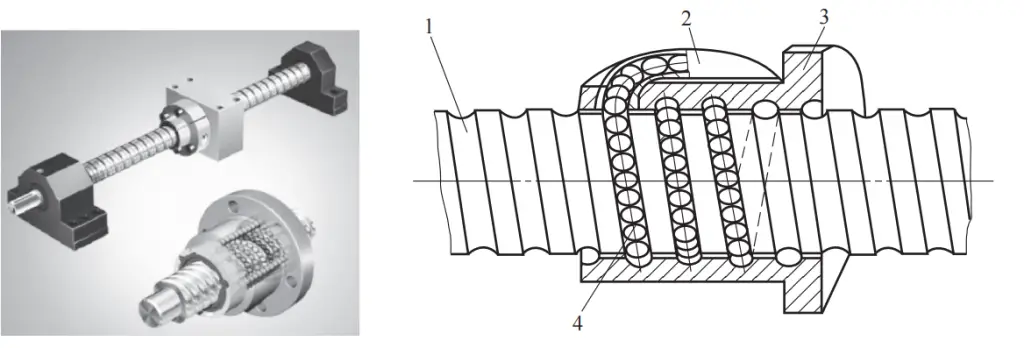
1-البرغي
2-الطريق السريع
3-الجوز
4-الكرة 4
قناة عودة الكرة لها دوران داخلي وخارجي على حد سواء. يظهر هيكل الدوران الداخلي في الشكل 24، حيث تظل الكرات في وضع الدوران الداخلي دائمًا على اتصال بسطح البرغي. في المجريين المجاورين، يتم تثبيت العواكس. عند دوران البرغي، تبدأ الكرات في التحرك من مخرج العاكس، وتتحرك لدورة واحدة، ثم تدخل إلى العاكس، مكونة حلقة دوران.
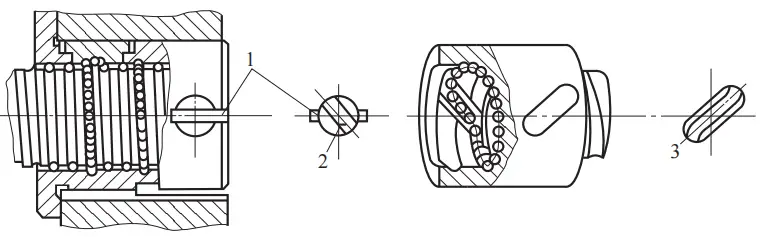
1-المفتاح
2،3-مفتاح العاكس
بشكل عام، يتم تثبيت 2 إلى 4 عاكسات على نفس الصامولة ويتم توزيعها بالتساوي على طول محيط الصامولة. في هيكل الدوران الداخلي، تكون حلقة الدوران الكروي قصيرة وسلسة وفعالة، والحجم الشعاعي للصامولة أصغر أيضًا، ولكن متطلبات دقة التصنيع عالية.
يظهر هيكل الدوران الخارجي للكرة في الشكل 25. بالنسبة لنوع الأخدود الحلزوني، عندما يدور البرغي، تتحرك الكرة من نقطة البداية، وعندما تصل إلى نقطة النهاية، يقوم مانع الكرة بحجب الكرة في الأخدود الحلزوني داخل دعامة الصامولة، ويؤدي الأخدود الحلزوني إلى نقطة البداية، مكونًا حلقة دوران.
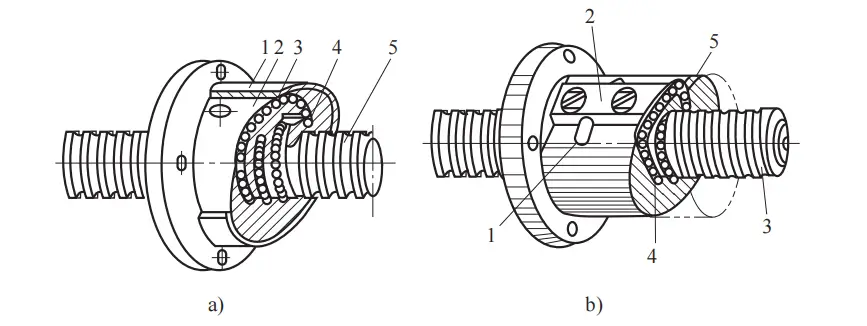
أ) نوع الأخدود الحلزوني
1-الأكمام
2-الجوز
3-الكرة 3
4-مانع الكرات 4 كرات
5-المسمار
ب) نوع إدخال الأنبوب
1- الأنبوب المثني
2-صفيحة الضغط 2-صفيحة الضغط
3-المسمار
4-الكرة 4
5-الطريق السريع
بالنسبة لنوع إدخال الأنبوب، عندما يدور البرغي، تبدأ الكرة في التحرك ويمكنها الدوران عبر أي مجرى مائي بين أنبوبين مثنيين، مع وجود الأنبوب المثني داخل دعامة الصامولة، وليس تركيب أنابيب مثنية في المجرى المائي الدائر الموجود بالفعل.
لإزالة رد الفعل العكسي، يتم تقسيم الصامولة إلى قسمين، ويتم ضبط الموضع المحوري النسبي لقسمي الصامولة باستخدام الرفادات أو الصواميل المزدوجة أو فرق الأسنان لإزالة الفجوة وتطبيق التحميل المسبق، بحيث يمكن أن يكون رد الفعل العكسي صفراً تحت حمل الاستخراج المقدر.
يوضح الشكل 26 تعديل الفجوة والتحميل المسبق، ومن بينها نوع الجوز المزدوج هو الأكثر استخدامًا، ونوع فرق الأسنان هو الأكثر موثوقية. النقل الحلزوني المتداول هو الأكثر خوفًا من السقوط في الغبار وبرادة الحديد وحبيبات الرمل. عادة، يجب غلق طرفي الصامولة بإحكام، ويجب غلق الجزء المكشوف من البرغي بغطاء "منفاخ" أو غلاف شريط فولاذي.
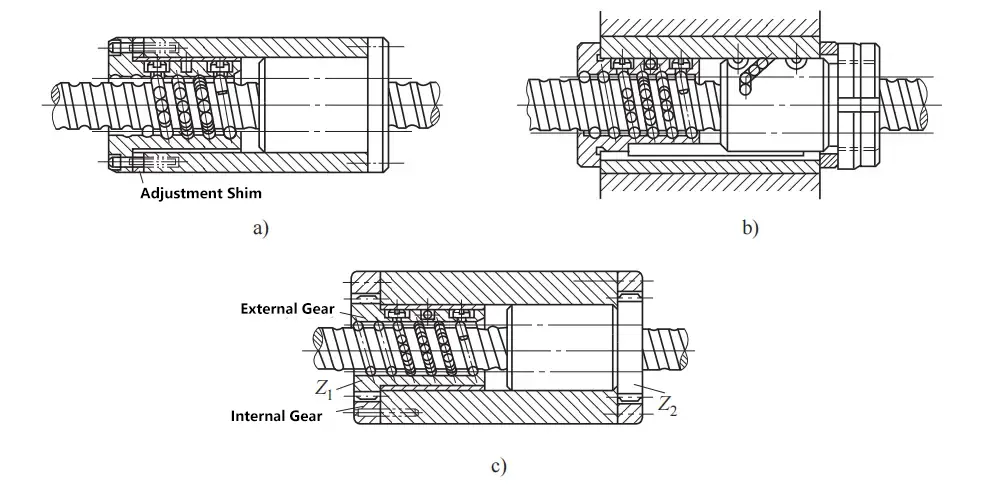
أ) نوع الشيم
ب) نوع الصامولة المزدوجة
ج) نوع فرق الأسنان
تتشابه حالة عمل الزوج الحلزوني المتداول مع حالة عمل المحامل المتداولة، لذلك يتم التعبير عن سعة حملها أيضًا من حيث الحمل الديناميكي المقنن والحمل الساكن المقنن، مع التعريف والحساب وطريقة الاختيار هي في الأساس نفس طريقة المحامل المتداول.
يتم تحديد مواصفات حجم زوج الدرفلة الحلزونية بشكل عام من خلال الحمل الديناميكي المقنن أو الحمل الساكن المقنن. بالنسبة للبراغي الدوارة النحيلة التي تتحمل أحمالًا ضاغطة، يلزم التحقق من ثبات قضيب الضغط؛ وبالنسبة للبراغي الدوارة ذات السرعة العالية ومسافة الدعم الكبيرة، يلزم حساب السرعة الحرجة.