Meningkatkan Kualitas Permukaan dalam Pemesinan: Teknik-teknik Utama
Kualitas permukaan pemesinan mengacu ke kondisi permukaan komponen setelah pemesinan. Konten utamanya meliputi: geometris...

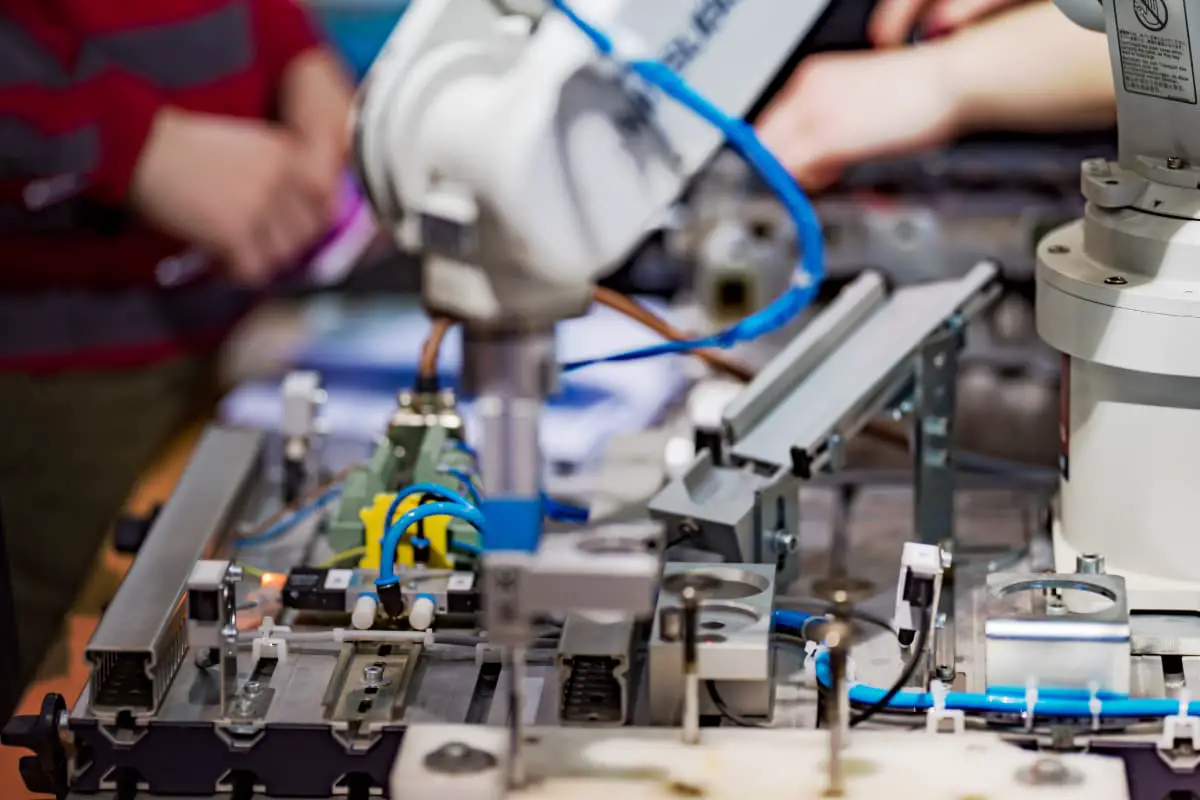
Sistem robot industri umumnya terdiri dari empat bagian: manipulator (tubuh), lingkungan, tugas, dan pengontrol, seperti yang ditunjukkan pada Gambar 1.
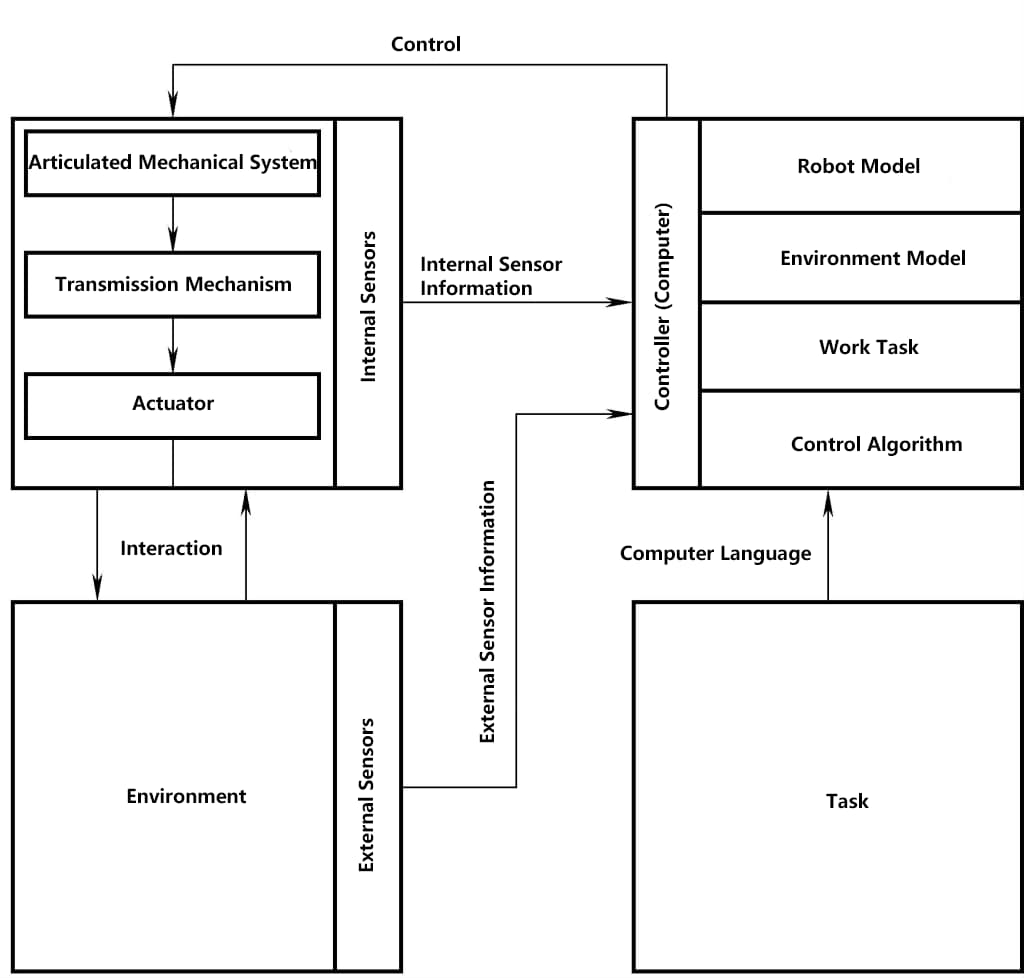
Lingkungan mengacu pada lingkungan kerja robot, termasuk objek kerja dan beberapa rintangan. Robot harus mencegah gangguan pada objek-objek ini selama pergerakannya.
Tugas mengacu pada pekerjaan yang harus diselesaikan oleh robot, seperti pengelasan, pengecatan, atau penanganan, dll. Biasanya dapat didefinisikan sebagai perbedaan antara dua kondisi lingkungan, dan perlu dijelaskan dan disimpan dalam pengontrol robot dengan bahasa atau program yang sesuai.
Pengontrol digunakan untuk menerima informasi yang terdeteksi oleh sensor internal dan eksternal robot, memprosesnya, dan menghasilkan sinyal kontrol sesuai dengan program kontrol tertentu, menggerakkan berbagai sendi tubuh robot, sehingga menyelesaikan tugas yang diberikan. Tubuh robot adalah mekanisme mekanis yang melakukan tugas, yang terdiri dari serangkaian mekanisme gerak yang saling berhubungan termasuk lengan, sendi, dan efektor akhir.
Dalam teknik praktis, badan robot juga dikenal sebagai manipulator, lengan robot, atau tangan mekanik, dll. Sebagian besar bodi robot adalah struktur mekanis bersendi dengan beberapa derajat kebebasan. Robot pengelasan biasanya memiliki 6 derajat kebebasan, 3 di antaranya memandu alat ujung ke posisi yang diperlukan, dan 3 lainnya digunakan untuk mengontrol postur alat.
Dalam arti luas, mekanisme robot secara umum dapat dianggap sebagai jenis batang mekanisme, termasuk bagian-bagian seperti lengan, pergelangan tangan, cakar, dan mekanisme berjalan. Untuk robot pengelasan, struktur tubuhnya terutama mencakup bagian lengan dan pergelangan tangan.
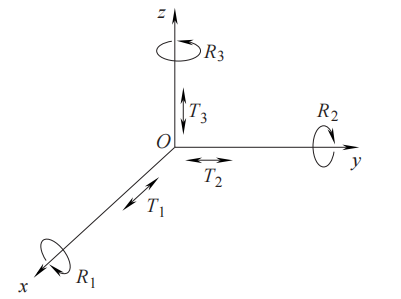
Untuk benda kaku yang bebas, ia memiliki 6 derajat kebebasan dalam ruang tiga dimensi, seperti yang ditunjukkan pada Gambar 2. Untuk menyelesaikan operasi spasial apa pun, robot juga membutuhkan 6 derajat kebebasan.
Pergerakan robot adalah kombinasi dari pergerakan lengan dan pergelangan tangan. Biasanya, bagian lengan memiliki 3 sendi, yang digunakan untuk mengubah posisi titik referensi pergelangan tangan, yang disebut mekanisme pemosisian; bagian pergelangan tangan juga memiliki 3 sendi, biasanya 3 sumbu sendi ini berpotongan, yang digunakan untuk mengubah postur alat akhir, yang disebut mekanisme orientasi. Oleh karena itu, seluruh robot dapat dilihat sebagai mekanisme pemosisian yang terhubung ke mekanisme orientasi.
Lengan robot adalah bagian yang secara langsung melakukan operasi, dan strukturnya akan sangat mempengaruhi kemampuan robot. Secara umum, lengan terdiri dari batang dan sendi (pasangan kinematik) yang menghubungkannya. Sendi memiliki satu atau beberapa derajat kebebasan.
Yang disebut derajat kebebasan adalah indikator fleksibilitas gerakan robot, yang berarti jumlah gerakan individu yang independen. Derajat kebebasan yang dapat menghasilkan gerakan aktif oleh aktuator disebut derajat kebebasan aktif, dan yang tidak dapat menghasilkan gaya penggerak disebut derajat kebebasan pasif. Tabel 1 menunjukkan simbol dan arah gerak dari sendi derajat kebebasan tunggal yang representatif.
Tabel 1 Sendi Derajat Kebebasan Tunggal
| Nama | Simbol | Contoh |
| Terjemahan |  |  |
| Rotasi |  |  |
| Rotasi ① | 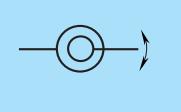 | 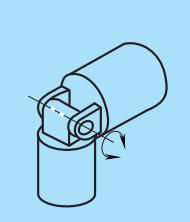 |
| Rotasi ② | 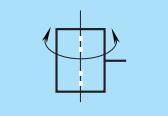 |
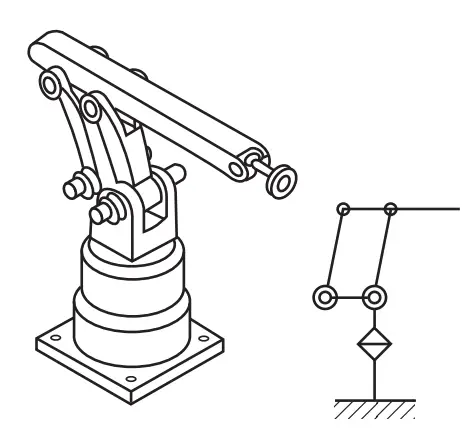
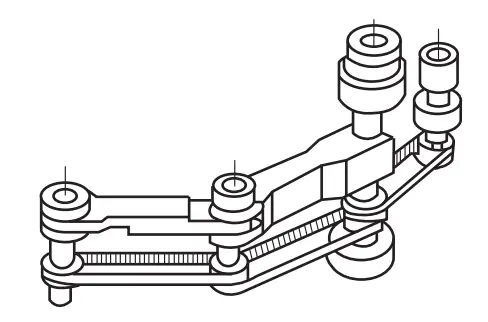
Metode pembuatan anggota dan sambungan secara kasar dapat dibagi menjadi dua jenis. Dari pandangan keseluruhan lengan, anggota dan sendi yang membentuk lengan dihubungkan secara serial, yang dikenal sebagai robot anggota serial atau robot rantai terbuka, sedangkan yang dihubungkan secara paralel disebut robot anggota paralel atau robot rantai tertutup. Pada Gambar 3, diberikan contoh derajat kebebasan tangan robot anggota serial dan paralel. Faktanya, sebagian besar tangan robot adalah tipe anggota serial.
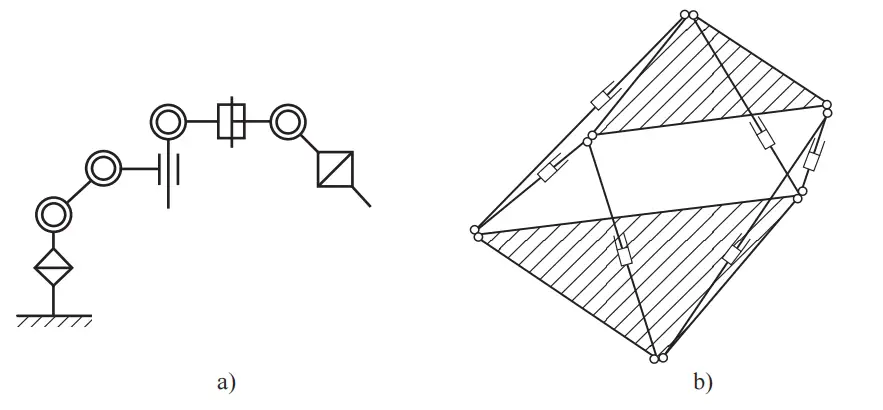
a) Jenis anggota serial
b) Jenis anggota paralel
Metode pembuatan derajat kebebasan sangat memengaruhi rentang gerak dan pengoperasian robot, di antara kinerja lainnya. Misalnya, sendi bola adalah sendi tiga derajat kebebasan yang dapat bergerak ke segala arah, yang dapat dengan mudah menentukan postur yang sesuai untuk tugas tersebut. Namun, karena keterbatasan aktuator, sulit untuk sepenuhnya mewujudkan fungsi ini. Oleh karena itu, robot biasanya menghubungkan tiga mekanisme derajat kebebasan tunggal secara seri untuk mencapai tiga derajat kebebasan ini.
Menggunakan serial seperti itu metode koneksibahkan dengan tiga derajat kebebasan yang sama, ada banyak kombinasi derajat kebebasan yang berbeda, masing-masing dengan fungsi yang berbeda.
Sebagai contoh, ada banyak metode konstruksi khusus untuk mekanisme pergelangan tangan 3 derajat kebebasan. Dengan mempertimbangkan kondisi yang memiliki derajat kebebasan translasi dan rotasi pada sumbu x, y, dan z, jika tidak ada offset di antara sambungan yang berdekatan, dan sumbu sambungan yang berdekatan tegak lurus atau sejajar satu sama lain, maka terdapat total 63 jenis. Selain itu, dengan memasukkan tiga derajat rotasi, lengan 6 derajat kebebasan memiliki sebanyak 909 cara untuk membangun derajat kebebasan.
Oleh karena itu, perlu untuk menentukan cara yang efektif dalam membangun derajat kebebasan berdasarkan kriteria seperti persyaratan operasi target.
Tujuan utama lengan adalah memposisikan dalam ruang tiga dimensi, dan untuk itu, seperti yang sudah disebutkan sebelumnya, diperlukan tiga derajat kebebasan. Jika mempertimbangkan kombinasi derajat kebebasan translasi, rotasi, dan rotasi, maka, secara keseluruhan terdapat 27 cara untuk menyusun derajat kebebasan. Namun, berdasarkan bentuk geraknya, cara representatif untuk membangun derajat kebebasan dapat dibagi menjadi empat jenis berikut ini:
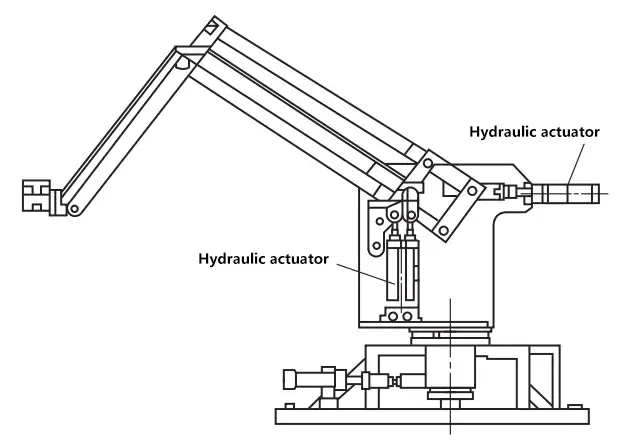
Robot tipe koordinat silinder, terlihat pada Gambar 4, terdiri dari kombinasi satu rotasi dan dua translasi; robot tipe koordinat bola, terlihat pada Gambar 5, dibentuk oleh kombinasi rotasi, rotasi, dan translasi.
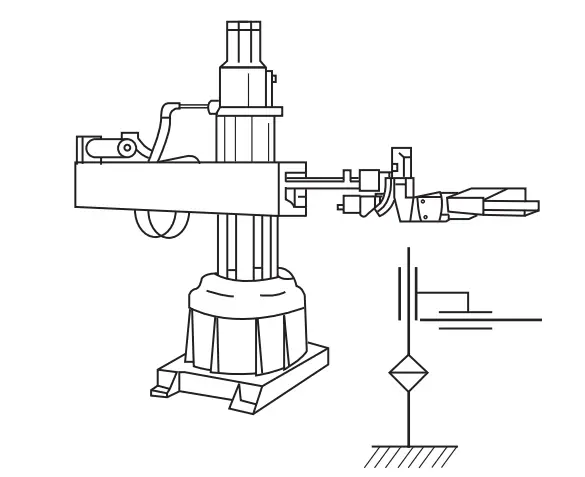
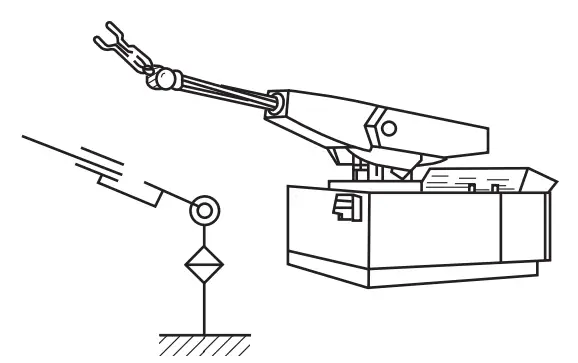
Kedua jenis robot ini, memiliki derajat kebebasan rotasi sentral, keduanya memiliki rentang gerak yang besar, dan perhitungan koordinatnya relatif sederhana. Praktis pertama di dunia robot industri"Versatran" dan "Unimate", masing-masing mengadopsi mekanisme koordinat silinder dan bola.
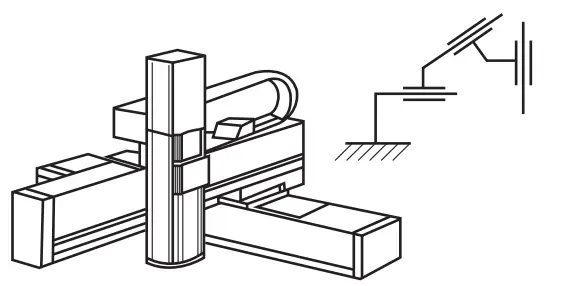
Robot jenis koordinat Cartesian (terlihat pada Gambar 6) memiliki derajat kebebasan yang independen di sepanjang sumbu x, y, dan z, dengan struktur yang sederhana, presisi tinggi, dan kalkulasi serta kontrol koordinat yang sangat sederhana. Namun, rentang geraknya tidak luas, sehingga sulit untuk mencapai tindakan kecepatan tinggi.
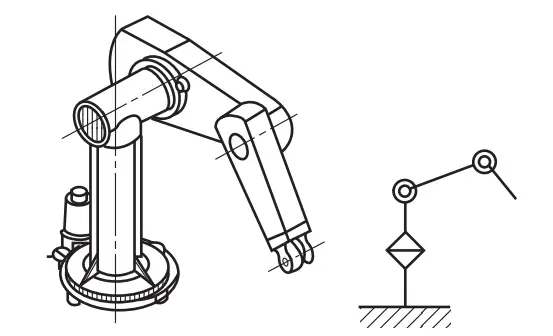
Robot yang diartikulasikan terutama terdiri dari derajat kebebasan rotasi dan rotasi, yang dapat dilihat sebagai struktur yang meniru lengan manusia, dengan struktur sambungan yang memiliki sambungan siku. Dalam hal ini, bagian dari siku ke bahu disebut lengan atas, dan bagian dari siku ke pergelangan tangan disebut lengan bawah. Struktur ini paling efektif untuk menentukan posisi dan postur tubuh apa pun dalam ruang tiga dimensi. Ini memiliki kemampuan beradaptasi yang baik untuk berbagai tugas, tetapi kerugiannya adalah bahwa perhitungan dan kontrol koordinat relatif kompleks, dan sulit untuk mencapai presisi tinggi.
Robot yang diartikulasikan, berdasarkan metode pembuatan derajat kebebasannya, dapat dibagi lagi menjadi beberapa kategori.
Gambar 7 adalah lengan umum, yang mengadopsi struktur rotasi, rotasi, derajat kebebasan rotasi. Lengan pada Gambar 8 menggunakan tautan jajaran genjang dan memasang aktuator yang digunakan untuk penggerak bersama di dasar lengan.
Gambar 9 disebut robot SCARA (Selective Compliance Assembly Robot Arm), dan struktur ujung depan lengan mengadopsi derajat kebebasan yang dapat bergerak secara sewenang-wenang dalam bidang dua dimensi, sehingga memiliki karakteristik kekakuan tinggi pada arah vertikal dan kekakuan rendah (kepatuhan) pada arah horizontal.
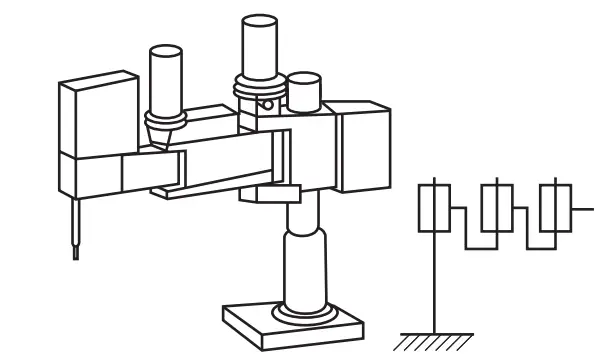
Namun demikian, dalam pengoperasian yang sesungguhnya, hal ini bukan terutama karena sifat kepatuhan khusus yang dimilikinya, tetapi karena ia dapat lebih mudah mencapai tindakan pada bidang dua dimensi, sehingga secara luas digunakan dalam operasi perakitan.
Pergelangan tangan robot adalah bagian penghubung antara lengan dan alat akhir, yang digunakan untuk mengubah posisi dan orientasi alat di ruang angkasa. Struktur pergelangan tangan umumnya rumit, yang secara langsung memengaruhi ketangkasan robot. Pergelangan tangan yang paling umum terdiri dari dua atau tiga sumbu sendi yang saling tegak lurus, dengan sendi pertama pergelangan tangan menjadi sendi keempat robot.
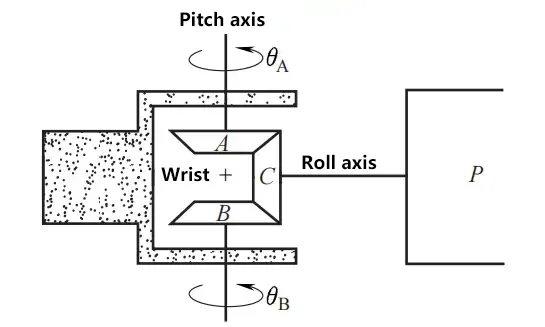
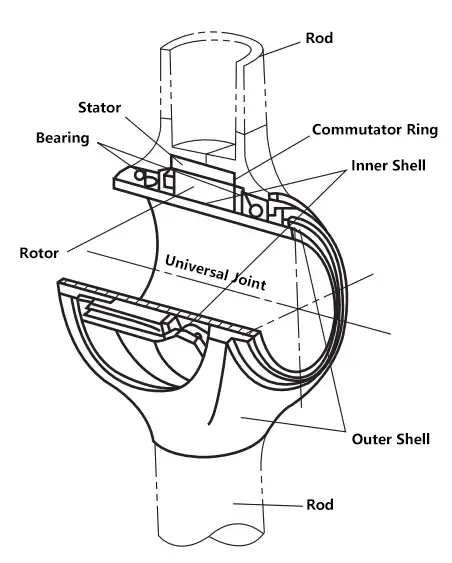
Gambar 10 adalah pergelangan tangan bulat Pitch-Roll sederhana. Tiga roda gigi bevel A, B, dan C membentuk mekanisme diferensial, dengan roda gigi A dan B terhubung ke dua motor penggerak melalui transmisi rantai atau sabuk, menggunakan perbedaan kecepatan dan arah rotasi roda gigi A dan B untuk mensintesis arah rotasi dan kecepatan alat.
Gambar 11 menunjukkan diagram skematik dan transmisi pergelangan tangan dengan 3 derajat kebebasan, dengan tiga sumbu yang tegak lurus satu sama lain dan berpotongan pada satu titik. Secara teoritis, pergelangan tangan ini dapat mencapai postur apa pun, tetapi karena keterbatasan struktural pada sudut sendi, pergelangan tangan ini tidak dapat mencapai postur apa pun. Jenis pergelangan tangan ini adalah bentuk yang paling umum pada robot.
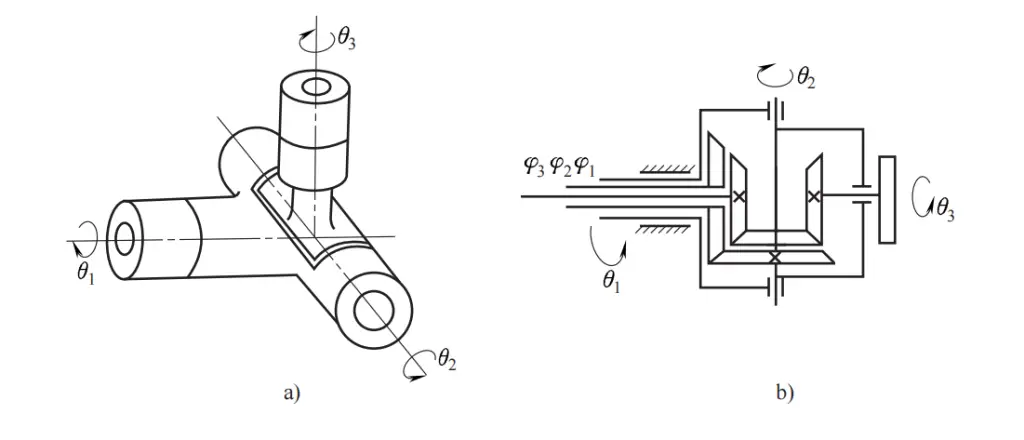
a) Diagram skematik
b) Diagram transmisi
Penggerak utama robot dibagi ke dalam penggerak hidraulik, penggerak pneumatik, dan penggerak elektrik, dll.
Keuntungan utama penggerak hidraulik adalah daya tinggi, struktur sederhana, penghapusan gigi reduksi, koneksi langsung dengan batang yang digerakkan, dan respons cepat. Penggerak servo hidraulik memiliki presisi tinggi, tetapi membutuhkan sumber hidraulik tambahan, dan rentan terhadap kebocoran cairan, oleh karena itu penggerak hidraulik sebagian besar digunakan dalam sistem robot berdaya sangat tinggi.
Aktuator pneumatik memiliki sumber energi dan struktur yang sederhana, tetapi dibandingkan dengan aktuator hidrolik, aktuator ini memiliki daya yang lebih kecil dalam kondisi volume yang sama (karena tekanan yang lebih rendah), dan kecepatannya tidak mudah dikendalikan, sehingga sebagian besar digunakan dalam sistem kontrol titik presisi rendah.
Aktuator listrik adalah aktuator yang paling banyak digunakan saat ini. Mereka memiliki sumber energi yang sederhana, berbagai perubahan kecepatan, efisiensi tinggi, dan kecepatan tinggi serta akurasi posisi, tetapi sering dihubungkan dengan roda gigi reduksi, sehingga membuat penggerak langsung menjadi sulit. Aktuator listrik dapat dibagi menjadi DC, penggerak motor servo AC, dan penggerak motor stepper.
Yang terakhir ini sebagian besar merupakan kontrol loop terbuka, kontrol sederhana tetapi tidak berdaya tinggi, sebagian besar digunakan dalam sistem robot berdaya rendah dan presisi rendah. Motor servo DC memiliki banyak keunggulan, tetapi sikatnya mudah aus dan dapat dengan mudah membentuk percikan api. Dengan kemajuan teknologi, motor servo AC secara bertahap menggantikan motor servo DC sebagai aktuator utama dalam robot dalam beberapa tahun terakhir.
Motor servo DC memiliki inersia rotasi yang kecil, respons start dan stop yang cepat, berbagai perubahan kecepatan, efisiensi tinggi, dan akurasi kontrol kecepatan dan posisi yang tinggi.
Motor servo DC memiliki banyak keunggulan dan rasio kinerja biaya yang tinggi, selalu menjadi motor standar untuk platform robot. Namun, sikatnya mudah aus dan dapat dengan mudah membentuk percikan api. Oleh karena itu, motor tanpa sikat telah dikembangkan, menggunakan sirkuit Hall untuk pergantian.
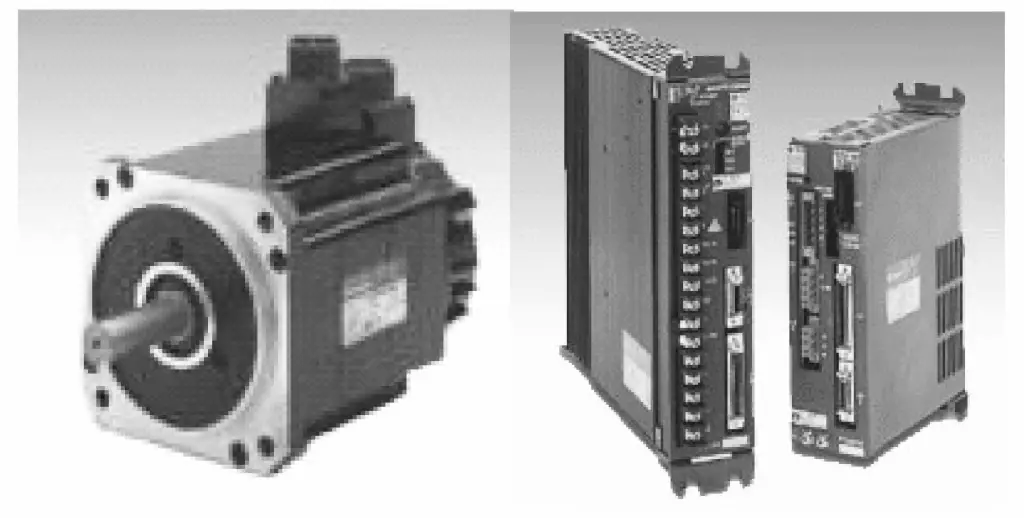
Gambar 12 menunjukkan motor servo DC dan penguat penggerak.

Motor servo AC memiliki daya yang lebih tinggi daripada motor servo DC, tidak memerlukan sikat, efisiensi tinggi, dan mudah dirawat, sehingga paling banyak digunakan dalam robot industri. Gambar 13 menunjukkan motor servo AC dan penguat penggerak.
Parameter teknis utama motor servo AC mirip dengan motor servo DC.
Motor stepper adalah jenis motor tanpa sikat, dengan magnet yang dipasang pada rotor dan belitan yang dipasang pada casing. Motor stepper pada dasarnya adalah motor berkecepatan rendah, mudah dikendalikan, mampu melakukan gerakan yang presisi, dengan kecepatan operasi optimal 50 ~ 100r/menit. Gambar 14 menunjukkan motor stepper dan driver.

Penggerak motor stepper sebagian besar merupakan kontrol loop terbuka, mudah dikendalikan tetapi tidak kuat, dengan efek pengereman yang baik, tetapi mungkin mengalami kehilangan langkah pada kecepatan yang sangat rendah atau di bawah beban berat, sering digunakan dalam sistem robotik berdaya rendah dan presisi rendah.
Ada dua jenis metode penggerak bersama: penggerak langsung dan penggerak tidak langsung. Metode penggerak langsung secara langsung menghubungkan poros output driver ke sumbu sambungan lengan robot. Metode penggerak tidak langsung mentransmisikan gaya driver ke sambungan melalui peredam atau baja tali kawatsabuk, hubungan paralel, dll.
Keuntungan dari penggerak langsung adalah bahwa ada lebih sedikit sistem mekanis antara pengemudi dan sambungan, sehingga mengurangi dampak faktor non-linear seperti gesekan, sehingga menghasilkan kinerja kontrol yang lebih baik. Namun, di sisi lain, untuk menggerakkan sambungan lengan secara langsung, torsi output driver harus sangat besar, selain itu, dinamika lengan juga harus dipertimbangkan.
Motor torsi yang dikembangkan pada tahun 1980-an, yang sistem mekanisnya terutama terdiri dari bantalan, dapat mencapai kemampuan penggerak mundur yang sangat baik (menggerakkan poros output driver dari sisi sambungan). Contoh struktur sambungan yang menggunakan motor torsi untuk penggerak langsung diberikan pada Gambar 15. Robot yang menggunakan metode penggerak langsung seperti itu biasanya disebut Robot Penggerak Langsung (Robot DD).
Sebagian besar sambungan robot digerakkan secara tidak langsung. Untuk jenis penggerak tidak langsung ini, torsi keluaran driver biasanya jauh lebih kecil daripada torsi yang diperlukan untuk menggerakkan sambungan, sehingga peredam harus digunakan.
Selain itu, karena lengan umumnya mengadopsi struktur balok kantilever, posisi pemasangan driver yang menggerakkan sendi robot multi-degree-of-freedom akan meningkatkan beban pada driver sendi akar lengan. Solusi untuk masalah ini biasanya dapat dicapai dengan mekanisme penggerak sederhana berikut.
Metode ini juga menempatkan pengemudi jauh dari sambungan, sebagai salah satu cara mengemudi jarak jauh. Rantai dan sabuk baja memiliki kekakuan yang baik dan dapat mentransmisikan torsi yang besar, sering digunakan pada robot jenis SCARA. Metode penggerak sabuk bergigi ditunjukkan pada Gambar 16.
Fitur dari metode ini adalah dapat memasang driver pada pangkal lengan, dan struktur ini membuat perhitungan transformasi koordinat menjadi sangat sederhana, contohnya ditunjukkan pada Gambar 17.
Seperti yang disebutkan sebelumnya, dalam proses menggerakkan sambungan robot dengan motor listrik, dengan mempertimbangkan torsi penggerak dan presisi kontrol, pada umumnya diperlukan mekanisme reduksi. Mekanisme reduksi yang umum digunakan dalam robot termasuk pereduksi harmonik dan pereduksi kincir sikloidal RV, dan transmisi heliks juga digunakan dalam beberapa transmisi linier robot.
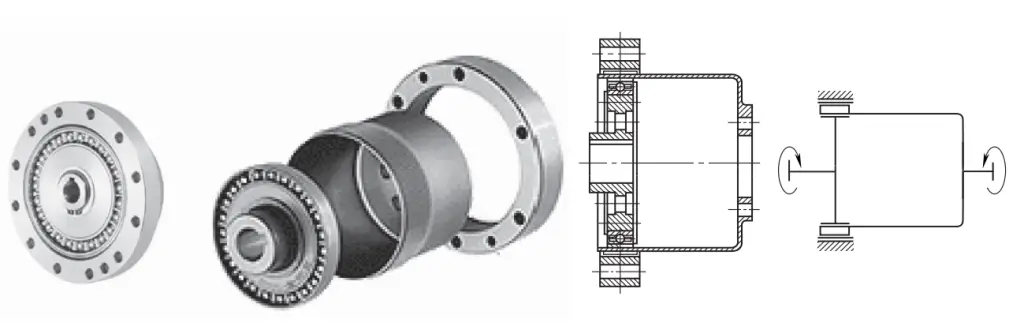
Peredam penggerak harmonik mencakup tiga komponen dasar: generator gelombang, flexspline, dan spline melingkar, seperti yang ditunjukkan pada Gambar 18. Salah satu dari ketiga komponen tersebut dapat diperbaiki, dengan dua komponen lainnya aktif dan pasif, yang dapat mencapai reduksi atau akselerasi, atau digunakan sebagai dua input dan satu output, membentuk transmisi diferensial. Gambar 19 menunjukkan struktur skematik peredam penggerak harmonik.
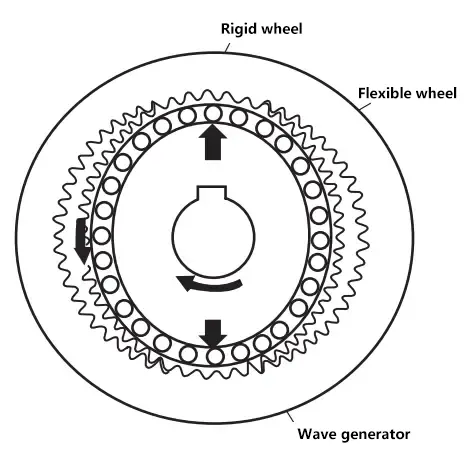
Prinsip kerja peredam penggerak harmonik ditunjukkan pada Gambar 20. Ketika spline melingkar ditetapkan, generator gelombang aktif, dan flexspline pasif, flexspline berubah bentuk di bawah aksi generator gelombang elips, dengan gigi flexspline di kedua ujung sumbu utama generator gelombang sepenuhnya menyatu dengan gigi spline melingkar.
Pada kedua ujung sumbu minor pembangkit gelombang, gigi flexspline benar-benar terlepas dari gigi spline melingkar; pada sisi sumbu mayor elips, gigi flexspline dan gigi spline melingkar berada dalam keadaan bertautan sebagian. Pada sisi rotasi sumbu utama ke arah positif, ini disebut zona meshing; pada sisi rotasi sumbu utama ke arah yang berlawanan, ini disebut zona pelepasan.
Karena rotasi generator gelombang yang terus menerus, empat kondisi penyambungan, pengikatan penuh, pelepasan, dan pelepasan total berubah secara berurutan, berputar terus menerus. Karena flexspline memiliki beberapa gigi yang lebih sedikit (biasanya 2 atau 4) daripada spline melingkar, ketika generator gelombang berputar satu putaran, flexspline memutar beberapa sudut gigi ke arah yang berlawanan, sehingga mencapai rasio reduksi yang besar.
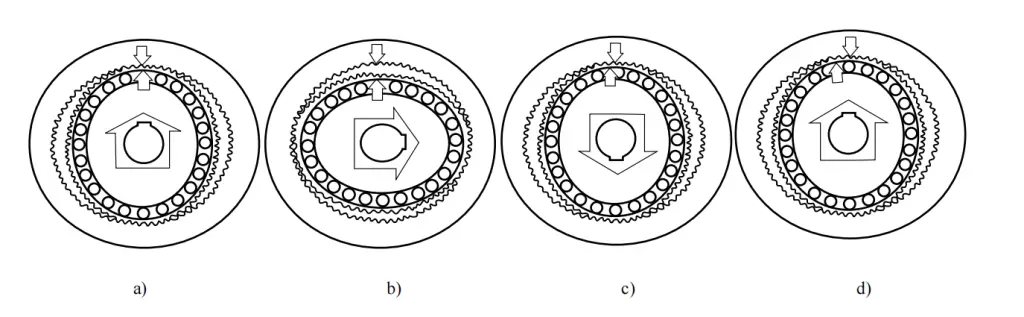
a)0°
b)90°
c)180°
d)360°
Dibandingkan dengan transmisi roda gigi pada umumnya, penggerak harmonik memiliki fitur utama sebagai berikut:
Karena banyak gigi yang terlibat dalam transmisi pada saat yang sama, transmisi menjadi lancar dan kapasitas muatnya tinggi. Dalam kondisi kerja yang sama, volume dapat dikurangi hingga 20% ~ 50%.
Jika parameter penyambungan dipilih dengan benar, kecepatan geser relatif permukaan gigi menjadi sangat rendah, sehingga menghasilkan keausan yang minimal dan efisiensi yang tinggi. Ketika strukturnya masuk akal dan pelumasannya bagus, untuk transmisi dengan i = 100, efisiensi η dapat mencapai 0,85; untuk transmisi dengan i = 75, efisiensi η dapat mencapai 0,92.
Dengan akurasi manufaktur yang sama, presisi penggerak harmonik bisa satu tingkat lebih tinggi daripada transmisi roda gigi biasa. Jika permukaan gigi digerinda dengan baik, presisi transmisi harmonik penggerak roda gigi bisa empat kali lebih tinggi daripada transmisi gigi biasa.
Serangan balik drive harmonik presisi pada umumnya bisa kurang dari 3′~1′, dan bahkan transmisi bebas serangan balik dapat dicapai.
Apabila menggunakan transmisi tetap flexspline tipe cup panjang, gerakan dapat ditransmisikan ke dalam kotak tertutup, yang sulit dicapai dengan mekanisme transmisi lainnya.
Berdasarkan karakteristik peredam harmonik di atas, peredam ini banyak digunakan dalam transmisi sambungan robot, yang sering kali berfungsi sebagai perangkat perlambatan dan transmisi untuk sambungan pergelangan tangan robot.
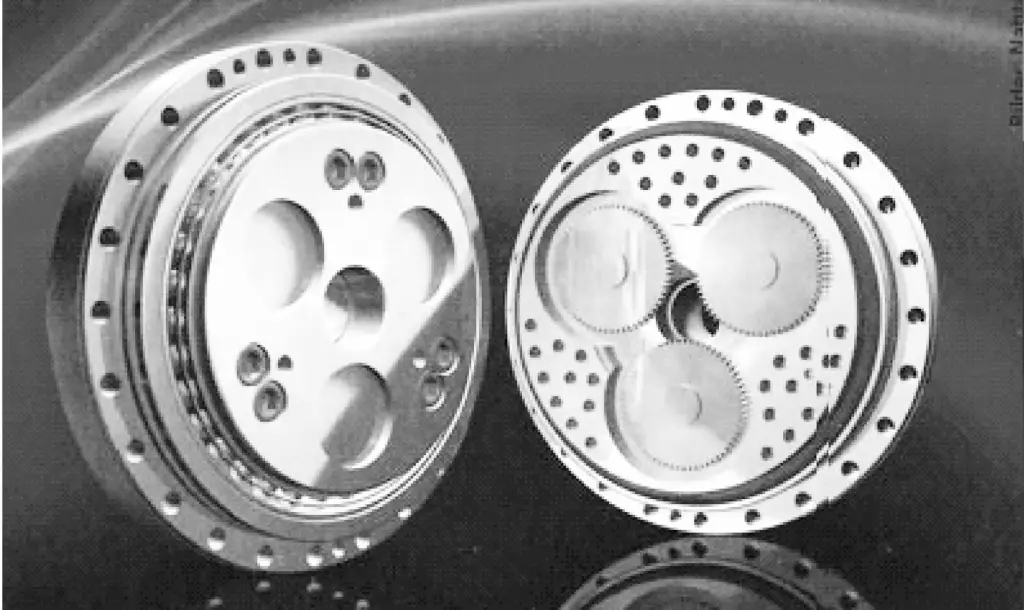
Perangkat transmisi kincir sikloidal RV terdiri dari satu set roda gigi planetary satu tahap yang diikuti oleh peredam kincir sikloidal satu tahap, seperti yang ditunjukkan pada Gambar 21.
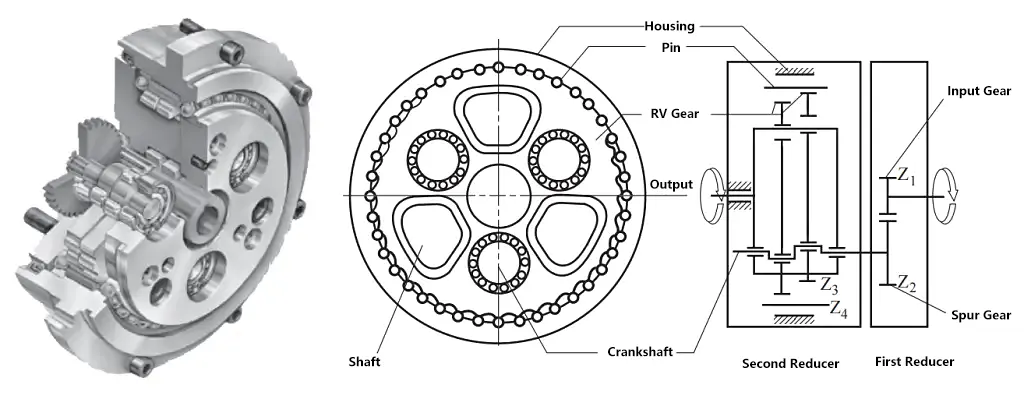
Ini memiliki poros input, yang menggerakkan 2 ~ 3 roda gigi planet yang didistribusikan di sekitar lingkar melalui roda gigi pada poros. Setiap roda gigi planet terhubung ke poros eksentrik dua arah, yang pada gilirannya menggerakkan dua roda gigi sikloidal RV yang berlawanan secara radial untuk menggelinding pada cangkang tetap dengan gigi internal. Roda sikloidal kemudian menggerakkan poros keluaran cakram untuk berputar melalui 2 ~ 3 poros pin non-silinder yang didistribusikan di sekeliling lingkar.
Dibandingkan dengan penggerak harmonik, penggerak kincir sikloidal RV, selain memiliki karakteristik yang sama yaitu rasio kecepatan tinggi, transmisi koaksial, struktur kompak, dan efisiensi tinggi, fitur yang paling signifikan adalah kekakuan yang baik dan inersia rotasi yang kecil.
Dibandingkan dengan perangkat penggerak harmonik yang diproduksi di Jepang dan digunakan pada robot, di bawah kondisi torsi output, kecepatan, dan rasio reduksi yang sama, volume keduanya hampir sama, tetapi kekakuan transmisi yang terakhir adalah 2 ~ 6 kali lebih besar. Dikonversi ke poros input, inersia rotasi lebih dari satu kali lipat lebih kecil, tetapi bobotnya meningkat 1~3 kali lipat.
Alasan berat keseluruhan yang besar dan inersia rotasi torsi roda gila yang sangat kecil pada poros input adalah karena perangkat transmisi RV menambahkan satu tahap transmisi planetary, yang memungkinkan poros input dan roda gigi dibuat menjadi silinder yang tidak terlalu besar, sedangkan bagian yang berputar di belakang, meskipun sangat berat, inersia rotasinya dikonversi ke poros input menjadi sangat kecil setelah satu tahap reduksi.
Karena kekakuan tinggi, inersia rotasi kecil, dan bobot yang relatif besar, peredam ini sangat cocok untuk sambungan rotasi tahap pertama (sambungan pinggang) robot, di mana bobot mandiri yang besar terletak di alas, dan kekakuan tinggi serta inersia rotasi kecil memainkan perannya secara penuh.
Kekakuan yang tinggi dapat secara signifikan meningkatkan frekuensi alami seluruh alat berat, mengurangi getaran; inersia rotasi yang kecil dapat meningkatkan kecepatan respons dan mengurangi konsumsi energi selama akselerasi dan deselerasi yang sering terjadi. Gambar 22 menunjukkan gambar nyata dari peredam RV.
Transmisi heliks bergulir dapat mencapai konversi antara gerakan putar dan gerakan linier. Strukturnya melibatkan penempatan bola yang sesuai di antara sekrup dengan alur heliks dan mur, mengubah gesekan geser antara sekrup dan mur menjadi gesekan gelinding, suatu jenis transmisi heliks, seperti yang ditunjukkan pada Gambar 23. Sekrup 1 dan mur 3 keduanya memiliki alur heliks dengan permukaan berbentuk busur, dan menyatukannya membentuk jalur balap heliks, dengan bola 4 yang berputar dan menggelinding di dalamnya.
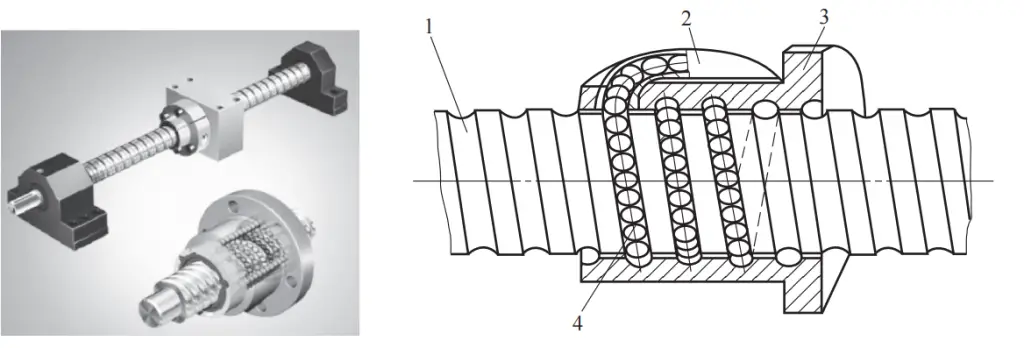
1-Sekrup
2-Arah Balap
3-Kacang
4-Bola
Saluran pengembalian bola memiliki sirkulasi internal dan eksternal. Struktur sirkulasi internal ditunjukkan pada Gambar 24, di mana bola dalam mode sirkulasi internal selalu bersentuhan dengan permukaan sekrup. Pada dua jalur balap yang berdekatan, dipasang deflektor. Ketika sekrup berputar, bola mulai bergerak dari outlet deflektor, bergerak berputar selama satu siklus, kemudian masuk ke deflektor, membentuk lingkaran sirkulasi.
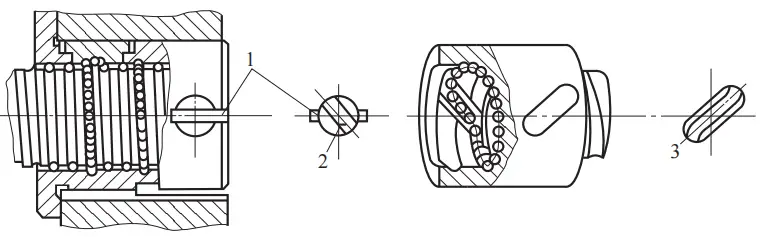
1-Kunci
Kunci 2,3-Deflektor
Umumnya, 2 hingga 4 pembalik dipasang pada mur yang sama dan didistribusikan secara merata di sepanjang lingkar mur. Dalam struktur sirkulasi internal, loop sirkulasi bola pendek, halus, efisien, dan ukuran radial mur juga lebih kecil, tetapi persyaratan presisi manufaktur tinggi.
Struktur sirkulasi eksternal bola ditunjukkan pada Gambar 25. Untuk jenis alur heliks, ketika sekrup berputar, bola bergerak dari titik awal, dan ketika mencapai titik akhir, pemblokir bola menghalangi bola ke dalam alur heliks di dalam penyangga mur, dan alur heliks mengarah ke titik awal, membentuk lingkaran sirkulasi.
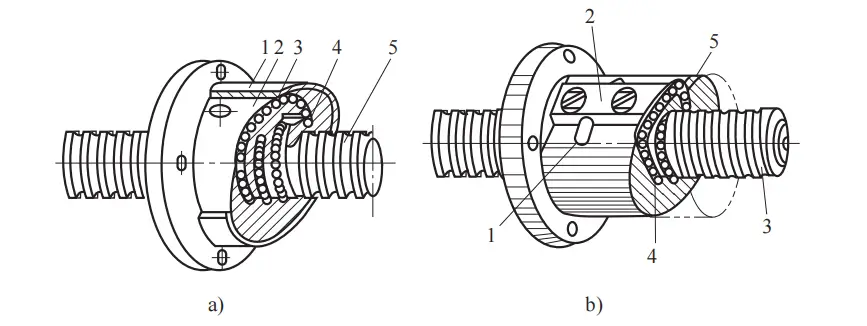
a) Jenis alur heliks
1-Lengan
2-Kacang
3-Bola
Pemblokir 4-Bola
5-Sekrup
b) Jenis penyisipan tabung
Tabung 1-Bengkok
Pelat 2-tekanan
3-Sekrup
4-Bola
5-Arah Balap
Untuk tipe penyisipan tabung, ketika sekrup berputar, bola mulai bergerak dan dapat bersirkulasi melalui jalur balap apa pun di antara dua tabung bengkok, dengan tabung bengkok di dalam penyangga mur, bukan memasang tabung bengkok di jalur balap yang sudah ada.
Untuk menghilangkan serangan balik, mur dibagi menjadi dua bagian, dan posisi aksial relatif dari dua bagian mur disesuaikan dengan shim, mur ganda, atau perbedaan gigi untuk menghilangkan celah dan menerapkan beban awal, sehingga serangan balik bisa nol di bawah beban ekstraksi terukur.
Gambar 26 menunjukkan penyetelan celah dan preload, di antaranya jenis mur ganda adalah yang paling banyak digunakan, dan jenis perbedaan gigi adalah yang paling dapat diandalkan. Transmisi heliks bergulir paling takut jatuh ke dalam debu, serbuk besi, butiran pasir. Biasanya, kedua ujung mur harus disegel, dan bagian sekrup yang terbuka harus ditutup dengan penutup "bellow" atau bungkus pita baja.
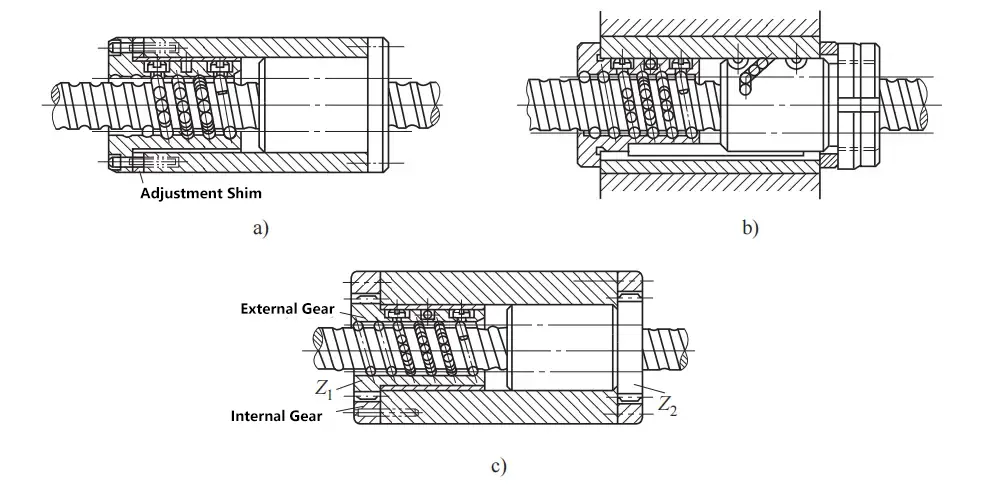
a) Jenis shim
b) Jenis mur ganda
c) Jenis perbedaan gigi
Kondisi kerja pasangan heliks bergulir mirip dengan bantalan gelinding, sehingga kapasitas bebannya juga dinyatakan dalam istilah beban dinamis terukur dan beban statis terukur, dengan definisi, perhitungan, dan metode pemilihan pada dasarnya sama dengan bantalan gelinding.
Spesifikasi ukuran pasangan heliks bergulir umumnya ditentukan oleh beban dinamis terukur atau beban statis terukur. Untuk sekrup gelinding ramping yang menanggung beban tekan, diperlukan pemeriksaan stabilitas batang kompresi; untuk sekrup gelinding dengan kecepatan tinggi dan jarak penyangga yang besar, diperlukan perhitungan kecepatan kritis.