
I. 스핀들 구성 요소
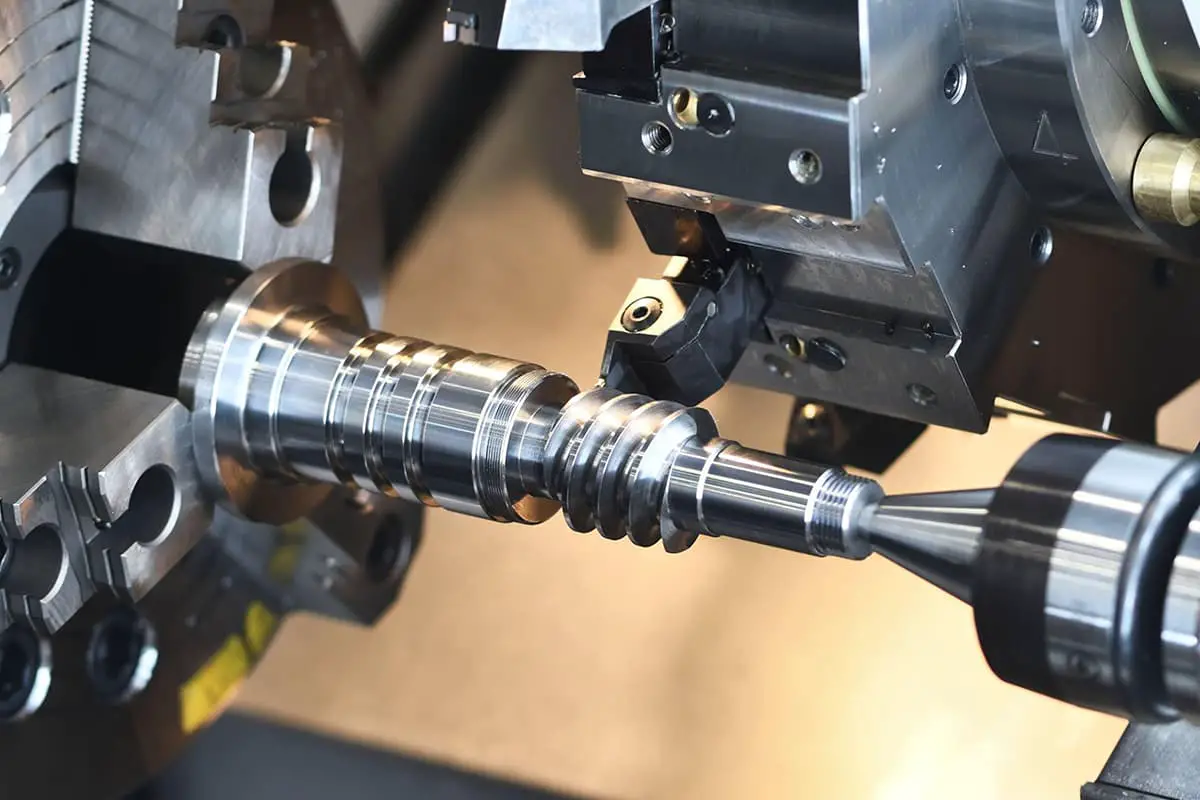
스핀들 구성품은 선반의 핵심 부품입니다. 작동 중에 공작물 또는 픽스처가 스핀들에 장착되고 스핀들에 의해 직접 구동되어 주 동작으로 회전합니다. 따라서 스핀들의 회전 정확도, 강성 및 진동 저항은 공작물의 가공 정확도 및 표면 거칠기에 직접적인 영향을 미칩니다.
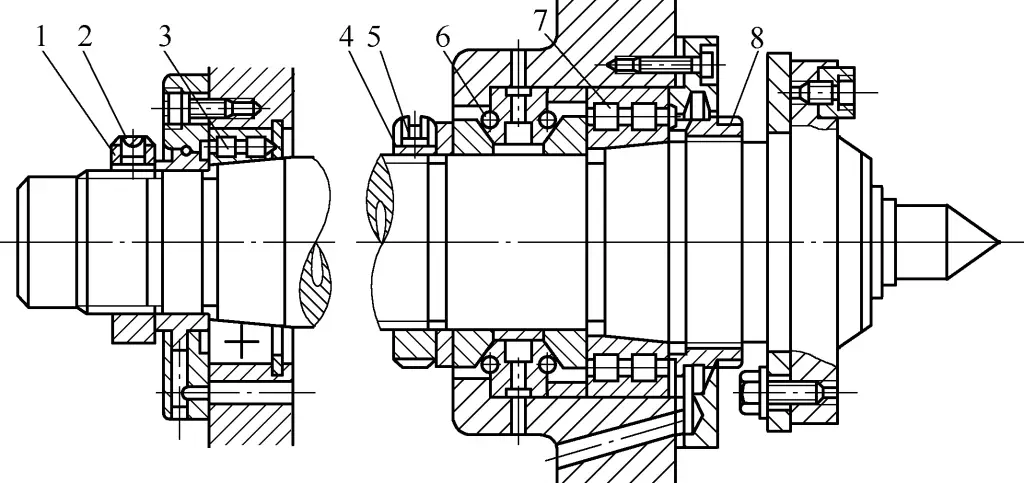
그림 1은 CA6140 선반의 스핀들 구성품을 보여줍니다.
1, 4, 8 - 견과류
2, 5 - 나사
3, 7 - 복열 짧은 원통형 롤러 베어링
6 - 양방향 스러스트 앵귤러 콘택트 베어링
스핀들의 우수한 강성과 진동 저항을 보장하기 위해 전면, 중간, 후면의 세 가지 지지대가 사용됩니다. 전면 지지대는 2열 짧은 원통형 롤러 베어링 7(NN3021K/P5)과 60° 양방향 추력 앵귤러 콘택트 볼 베어링 6(51120/P5)의 조합을 사용하여 절삭 시 발생하는 후방 힘과 좌우 이송력을 견뎌냅니다.
후면 지지대는 2열 짧은 원통형 롤러 베어링 3(NN3015K/P6)을 사용합니다. 1열 짧은 원통형 롤러 베어링(NU216)은 스핀들 중앙에 보조 지지대로 사용됩니다(그림에 표시되지 않음). 이 구조는 고하중 조건에서 우수한 강성과 작동 안정성을 유지합니다.
스핀들의 전면 및 후면 지지대는 2열 짧은 원통형 롤러 베어링을 사용하므로 내부 링의 테이퍼 구멍이 샤프트 저널의 테이퍼 표면과 일치합니다. 베어링이 마모되어 반경 방향 간극이 증가하면 베어링 내륜을 기준으로 스핀들 저널의 축 위치를 조정하여 반경 방향 간극을 비교적 쉽게 조정할 수 있습니다.
중간 베어링(NU216)은 스핀들 샤프트에 상당한 힘이 가해지고 중간 지지대에 약간의 처짐이 있는 경우에만 지지력을 제공합니다. 따라서 샤프트와 베어링 사이에 일정한 간격이 있어야 합니다.
1. 전면 베어링 조정 방법
너트 4와 8을 사용하여 조정합니다. 조정할 때는 먼저 너트와 나사 5를 풀고 너트 4를 조여 베어링 7의 내륜을 스핀들의 테이퍼 저널을 기준으로 오른쪽으로 이동시킵니다. 테이퍼 표면으로 인해 베어링의 내륜이 방사형으로 확장되어 롤러와 내륜 및 외륜 사이의 간격이 줄어듭니다. 적절하게 조정한 후 잠금 나사와 너트를 조입니다.
2. 후면 베어링 조정 방법
너트 1을 사용하여 조정합니다. 조정할 때는 먼저 잠금 나사 2를 푼 다음 너트를 조입니다. 작동 원리는 전면 베어링과 동일하지만 과도하게 조이지 않도록 "서서히 조이는" 방법을 사용하도록 주의해야 합니다. 적절하게 조정한 후 잠금 나사를 조입니다.
일반적으로 전면 베어링을 조정하는 것으로 충분합니다. 전면 베어링을 조정해도 필요한 회전 정확도를 얻지 못하는 경우에만 후면 베어링을 조정해야 합니다.
II. 클러치
클러치는 공작 기계 동작 시작, 정지, 속도 변경 및 방향 변경을 위해 언제든지 두 개의 동축 샤프트 또는 샤프트와 중공 슬리브 변속기 구성품을 샤프트에 결합하거나 분리하는 데 사용됩니다.
클러치에는 여러 종류가 있습니다. CA6140 선반에는 맞물림 클러치, 멀티 플레이트 마찰 클러치, 오버런 클러치가 있습니다.
1. 인게이지먼트 클러치
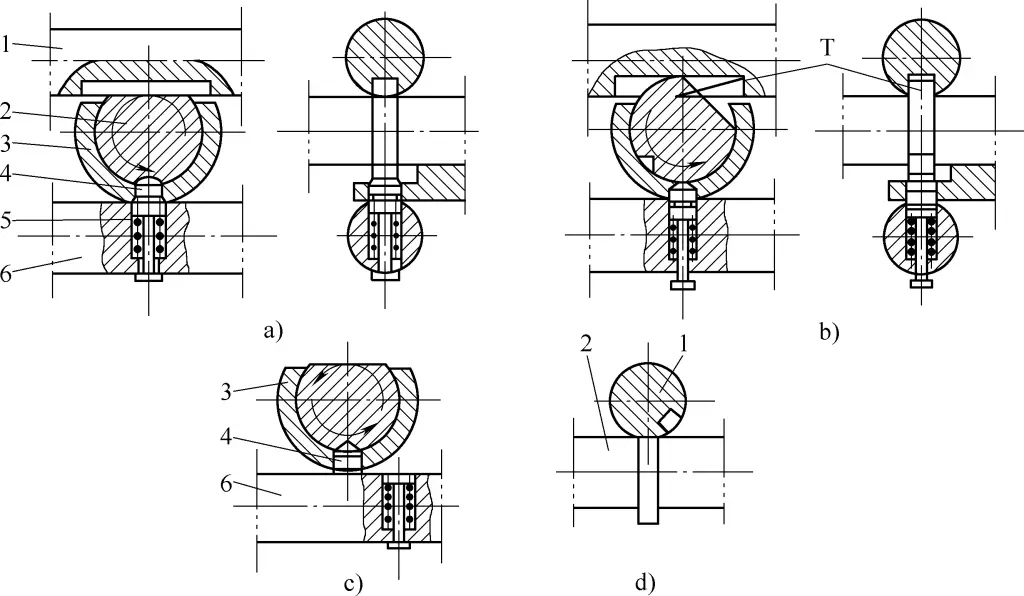
맞물림 클러치는 부품에 두 개의 맞물리는 죠를 사용하여 동작과 토크를 전달합니다. 구조적 형태에 따라 도그 클러치와 기어 클러치의 두 가지 유형으로 나뉩니다.
도그 클러치는 그림 2a 및 2b와 같이 끝면에 턱이있는 두 부분으로 구성됩니다. 클러치 2는 가이드 키(또는 스플라인) 3으로 샤프트 4에 연결됩니다. 클러치가 있는 기어 1은 샤프트에 느슨하게 장착되며, 죠의 결합 또는 분리를 통해 기어가 샤프트와 회전하도록 연결되거나 샤프트에서 유휴 상태가 되도록 할 수 있습니다.
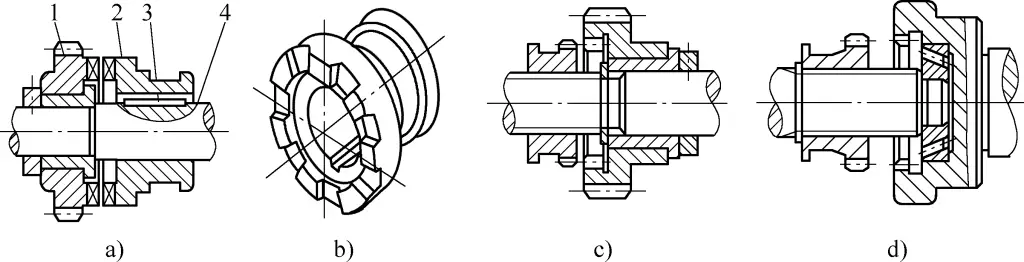
a), b) 개 클러치
c), d) 기어 클러치
1 - 기어
2 - 클러치
3 - 가이드 키
4 - 샤프트
기어 클러치는 톱니와 모듈 수가 같은 직선형 평 기어 모양의 두 부분, 즉 하나는 외부 기어이고 다른 하나는 내부 기어(그림 2c 및 2d 참조)로 구성됩니다. 기어가 맞물리면 느슨한 기어를 샤프트에 연결하거나(그림 2c 참조) 두 개의 동축 샤프트(그림 2d 참조)를 연결하여 함께 회전할 수 있습니다. 기어가 분리되면 모션 연결이 끊어집니다.
인게이지먼트 클러치는 단순하고 컴팩트한 구조로 되어 있습니다. 일단 맞물리면 상대적인 미끄러짐이 없어 정확한 변속비를 보장합니다. 하지만 회전 중에 맞물리면 충격이 발생하므로 매우 낮은 속도나 정지 상태에서만 맞물릴 수 있어 작동이 불편합니다.
2. 멀티 플레이트 마찰 클러치
CA6140 선반 주축의 시작/정지 및 후진 메커니즘은 그림 3a와 같이 기계식 양방향 멀티플레이트 마찰 클러치를 사용합니다. 구조적으로 동일한 왼쪽과 오른쪽 부품으로 구성됩니다. 왼쪽 클러치는 스핀들을 정방향으로 구동하고 오른쪽 클러치는 역방향으로 구동합니다. 왼쪽 클러치를 예로 들어 그 구조와 원리를 설명하겠습니다(그림 3b 참조).
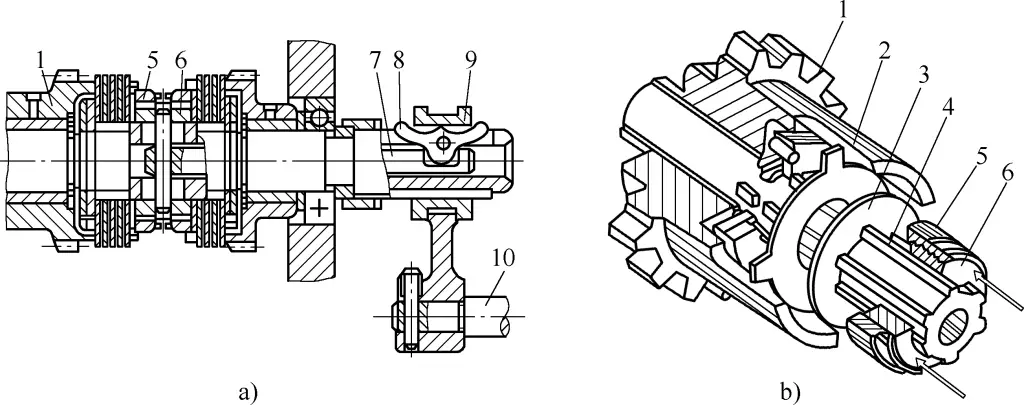
a) 구조 다이어그램
b) 원리 다이어그램
1 - 기어
2 - 외부 마찰판
3 - 내부 마찰판
4 - 샤프트
5 - 압력 슬리브
6 - 나사산 링
7 - 로드
8 - 로커 암
9 - 슬라이딩 링
10 - 작동 장치
이 클러치는 서로 다른 모양의 내부 및 외부 마찰판이 교대로 여러 개로 구성되어 있습니다. 마찰판을 서로 눌렀을 때 마찰판의 접촉면 사이에 발생하는 마찰력을 통해 운동과 토크를 전달합니다. 스플라인 구멍이 있는 내부 마찰판(3)은 샤프트(4)의 스플라인에 연결되고, 외부 마찰판(2)은 부드러운 원형 구멍이 있으며 샤프트의 스플라인 외부 원형 표면에 느슨하게 장착되어 있습니다.
이 마찰판의 바깥쪽 둘레에는 4개의 톱니가 돌출되어 있어 느슨한 기어 1의 오른쪽 끝에 있는 슬리브 부분의 홈에 맞물립니다. 함께 누르지 않으면 내부 마찰판과 외부 마찰판이 접촉하지 않고 스핀들이 고정된 상태로 유지됩니다.
작동 장치 10(그림 3a 참조)이 슬라이딩 링 9를 오른쪽으로 움직이면 로드 7(스플라인 샤프트 구멍 내부)의 로커 암 8이 지점을 중심으로 회전하여 하단 끝이 로드를 왼쪽으로 밀게 됩니다. 로드의 왼쪽 끝에는 고정 핀이 있어 나사산 링 6과 압력 슬리브 5를 왼쪽으로 눌러 왼쪽 마찰판 세트를 압축합니다. 플레이트 사이의 마찰을 통해 토크가 샤프트에서 느슨한 기어로 전달되어 스핀들이 앞으로 회전합니다.
마찬가지로 작동 장치가 슬라이딩 링을 왼쪽으로 움직이면 오른쪽 마찰판 세트가 압축되어 스핀들이 역회전합니다. 슬라이딩 링이 중간 위치에 있으면 왼쪽과 오른쪽 마찰판 세트가 모두 이완되어 샤프트 4의 움직임이 기어에 전달되지 않아 스핀들의 회전이 멈춥니다.
플레이트 마찰 클러치의 간격은 너무 크거나 너무 작지 않은 적절한 간격이어야 합니다. 간격이 너무 크면 마찰력이 감소하여 선반의 정상적인 동력 전달에 영향을 미치고 마찰 플레이트가 과도하게 마모될 수 있습니다. 간격이 너무 작으면 고속 절삭 시 과열이 발생하여 "스톨"이 발생하고 기계가 손상될 수 있습니다. 간격 조정은 그림 3b와 그림 4에 나와 있습니다.
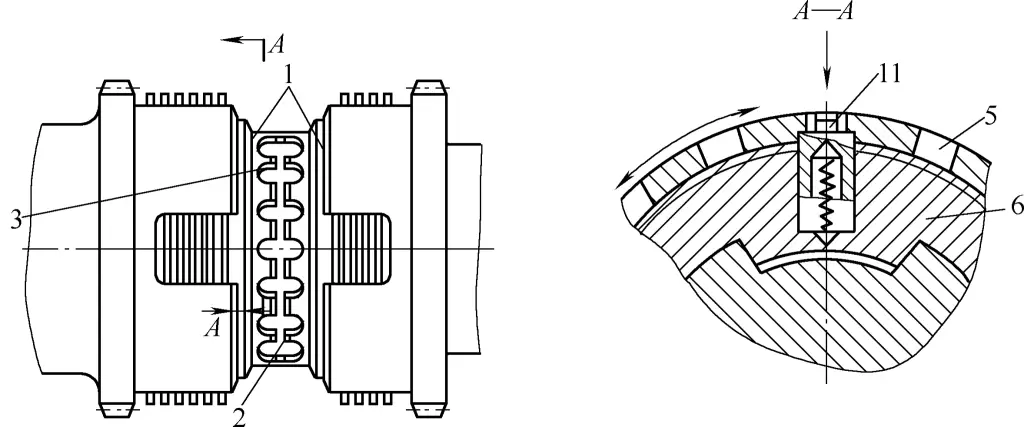
1 - 압력 슬리브
2 - 나사산 링
3 - 스프링 핀
조정하려면 먼저 선반의 전원 공급 장치를 분리하고 주축대 커버를 엽니다. 도구를 사용하여 압력 슬리브 1의 노치에서 스프링 핀 3을 누른 다음 압력 슬리브를 회전하여 나사산 링 2를 기준으로 작은 축 방향으로 움직입니다. 이렇게 하면 마찰판 사이의 간격이 변경되어 마찰판 사이의 클램핑력과 전달 토크의 크기가 조정됩니다.
간극이 적절하게 조정되면 스프링 핀이 압력 슬리브의 홈에서 튀어나오도록 하여 회전 중에 압력 슬리브가 느슨해지는 것을 방지합니다.
3. 오버런 클러치
오버런 클러치는 주로 자동 모션 변환을 위해 고속과 저속을 번갈아 가며 사용하는 샤프트에 사용됩니다. CA6140 선반의 캐리지에는 오버런 클러치가 포함되어 있으며, 그 구조 원리는 그림 5에 나와 있습니다.
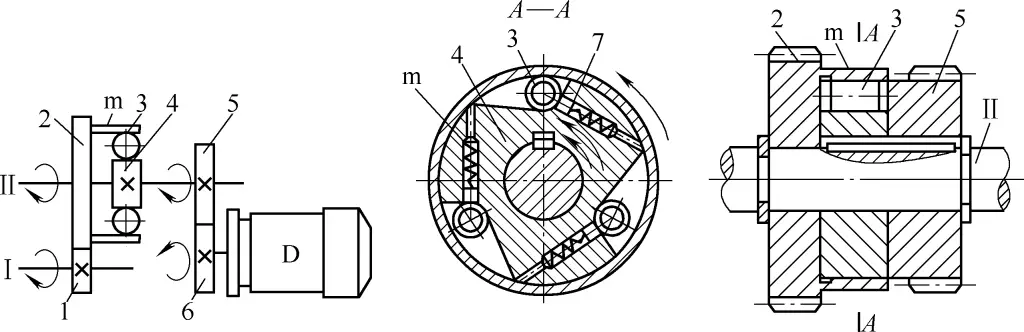
1, 2, 5, 6 - 기어 쌍
3 - 롤러
4 - 별 모양 바디
7 - 스프링 핀
m - 소매
D - 고속 모터
별 모양의 몸체 4, 롤러 3 3개, 스프링 핀 7 3개, 기어 2의 오른쪽 끝에 있는 슬리브 m으로 구성됩니다. 기어 2는 샤프트 2에 느슨하게 장착되어 있고, 별 모양의 몸체 4는 키로 샤프트 2에 연결됩니다.
슬로우 모션이 샤프트 I에서 기어 쌍 1과 2를 통해 전달되면 슬리브 M이 시계 반대 방향으로 회전하여 마찰력에 의해 롤러 3을 웨지 간격의 좁은 부분으로 밀어냅니다. 롤러가 별 모양 본체 4와 슬리브 M 사이에 쐐기를 박아 별 모양 본체와 샤프트 II가 함께 회전합니다.
이때 고속 모터 M이 시동되면 빠른 동작이 기어 쌍 6과 5를 통해 샤프트 II로 전달되어 별 모양의 본체가 시계 반대 방향으로 회전합니다.
별 모양 본체의 회전 속도가 기어 슬리브의 회전 속도를 몇 배 초과하면 롤러가 스프링을 압축하고 쐐기 틈새를 빠져나가 슬리브와 별 모양 본체 사이의 동작이 자동으로 끊어집니다. 고속 모터가 회전을 멈추면 오버런 클러치가 자동으로 다시 작동하고 기어 슬리브가 다시 별 모양 본체를 구동하여 천천히 회전합니다.
III. 제동 장치
제동 장치의 기능은 선반의 정지 과정에서 주축에서 움직이는 부품의 회전 관성을 극복하여 스핀들의 회전을 빠르게 정지시켜 보조 시간을 줄이는 것입니다.
그림 6은 CA6140 선반 주축의 샤프트 IV에 설치된 밴드 브레이크를 보여줍니다. 브레이크 휠 8, 브레이크 밴드 7, 레버 4로 구성됩니다. 브레이크 휠은 샤프트 IV에 스플라인으로 연결된 강철 디스크입니다. 브레이크 밴드는 마찰 표면의 마찰 계수를 높이기 위해 안쪽에 강철 와이어 석면 층이 고정된 강철 밴드입니다.
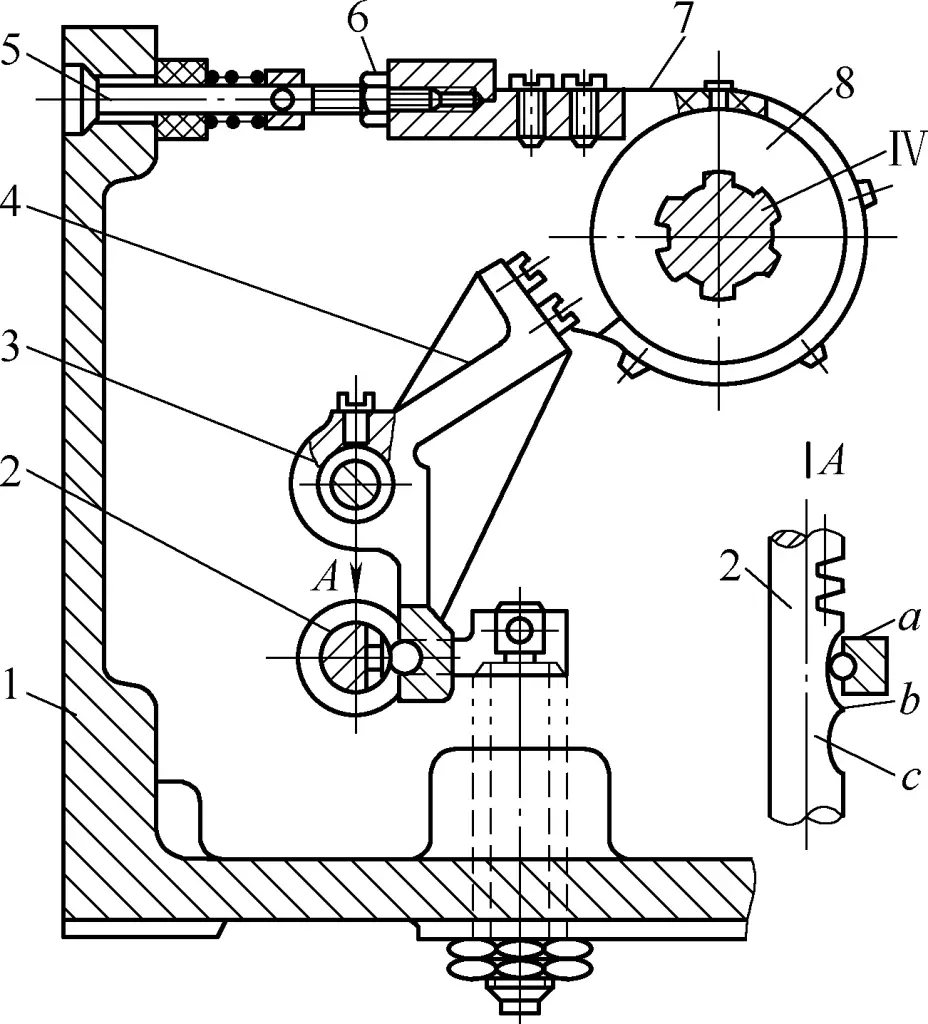
1 - 주축
2 - 랙
3 - 샤프트
4 - 레버
5 - 나사
6 - 너트
7 - 브레이크 밴드
8 - 브레이크 휠
브레이크 밴드는 브레이크 휠을 감싸며 한쪽 끝은 조절 나사 5를 통해 주축 1에 연결되고 다른 쪽 끝은 레버의 상단에 고정됩니다. 레버는 샤프트 3을 중심으로 회전할 수 있습니다.
브레이크는 랙 2(즉, 그림 3의 작동 장치 10)를 통해 멀티 플레이트 마찰 클러치와 연결됩니다. 하단이 랙의 호 모양의 오목한 부분 A 또는 C에 닿으면 스핀들은 회전 상태가 되고 브레이크 밴드는 느슨해집니다. 랙 샤프트를 움직여 돌출된 부분 B가 레버의 하단에 닿도록 하면 레버가 샤프트 3을 중심으로 시계 반대 방향으로 회전하면서 브레이크 휠 주변의 브레이크 밴드가 조여집니다. 이렇게 하면 마찰 제동 토크가 발생하여 샤프트 IV와 스핀들의 회전을 빠르게 정지시킵니다.
제동 장치에서 브레이크 밴드의 조임은 다음과 같이 조정할 수 있습니다: 메인 스핀들 박스 커버를 열고 너트 6을 푼 다음 스핀들 박스 뒷면에 있는 나사 5를 조정하여 브레이크 밴드의 적절한 조임을 설정합니다. 표준은 정지 시 주축이 2~3회전 이내에 빠르게 정지하고, 시동 시 브레이크 밴드가 완전히 풀릴 수 있는 정도여야 합니다. 조정이 끝나면 너트를 조이고 스핀들 박스 커버를 교체합니다.
IV. 피드 과부하 보호 메커니즘
이송 과부하 보호 메커니즘의 기능은 이송 저항이 너무 크거나 이송 과정 중 우발적인 사건으로 인해 공구 캐리지가 막히면 자동으로 동력 전달 라인을 분리하고 공구 캐리지 이송을 중지하여 이송 부품의 손상을 방지하는 것입니다.
1. 구조 원리
안전 클러치라고도 하는 CA6140 선반의 이송 과부하 보호 메커니즘은 에이프런에 설치됩니다. 그 구조는 그림 7에 나와 있으며, 여기서 M 7 는 안전 클러치입니다.
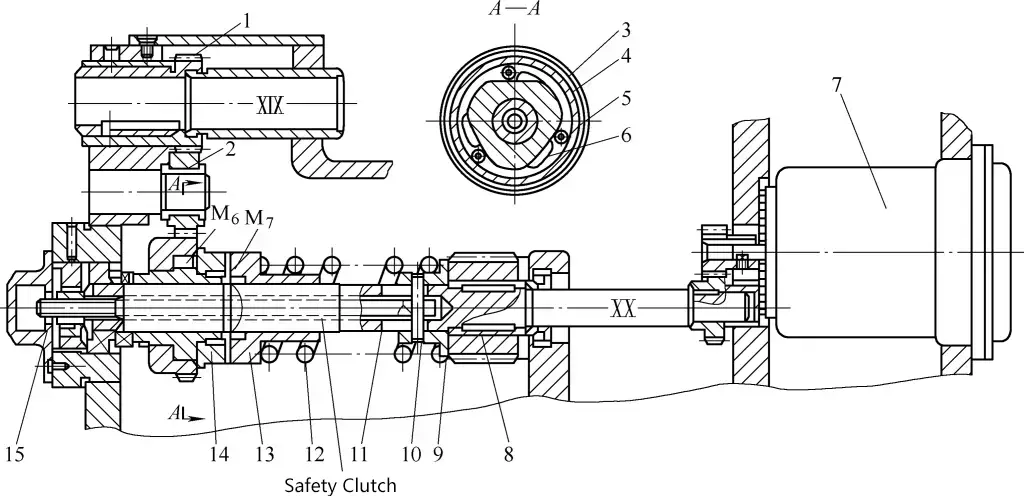
1, 2, 4 - 기어
3 - 별 바퀴
5 - 롤러
6, 12 - 스프링
7 - 급속 이송 모터
8 - 웜 기어
9 - 스프링 좌석
10 - 크로스 핀
11 - 풀 로드
13 - 클러치의 오른쪽 절반
14 - 클러치의 왼쪽 절반
15 - 너트
끝면에 나선형 톱니가 있는 왼쪽과 오른쪽 절반 14와 13으로 구성됩니다. 왼쪽 절반은 오버런 클러치 M의 스타 휠 3에 키로 연결됩니다. 6 샤프트 XX에 느슨하게 장착되고 오른쪽 절반은 샤프트 XX에 스플라인으로 연결됩니다.
정상적인 회전 조건에서 안전 클러치의 왼쪽과 오른쪽 절반은 스프링 3의 압력으로 서로 맞물려(그림 8a 참조) 피드 로드에서 웜 기어 8로 동작을 전달합니다(그림 7 참조).
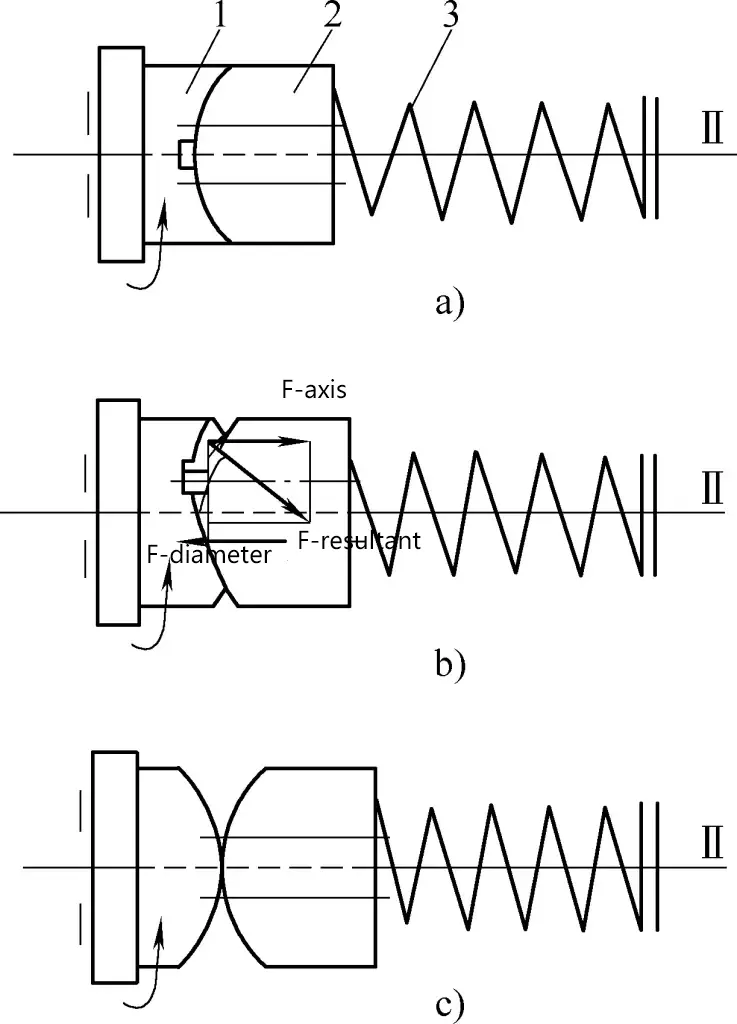
a) 정상 전송
b) 과부하 시 클러치
c) 전송 연결 끊김
1 - 클러치의 왼쪽 절반
2 - 클러치의 오른쪽 절반
3 - 봄
과부하가 걸리면 클러치에 작용하는 축 방향 힘이 스프링 3의 압력을 초과하여 클러치 2의 오른쪽 절반이 오른쪽으로 밀려납니다(그림 8b 참조). 클러치 1의 왼쪽 절반은 이송봉에 의해 정상적으로 회전하지만 오른쪽 절반은 구동할 수 없으므로 양쪽 끝면의 톱니가 미끄러져(그림 8c 참조) 샤프트 XX와 공구 캐리지 사이의 동작 연결이 끊어져 메커니즘이 손상되지 않도록 보호합니다.
과부하 오류가 제거된 후 스프링 3의 압력으로 안전 클러치는 그림 8a에 표시된 정상 작동 상태로 돌아갑니다.
2. 조정 방법
기계의 최대 허용 이송 저항에 따라 스프링 12가 설정하는 압력이 결정됩니다(그림 7 참조). 조정하려면 에이프런의 왼쪽 커버를 열고 너트 15를 사용하여 스프링 압력의 크기를 조정하는 풀로드 11과 크로스 핀 10을 통해 스프링 시트 9의 축 위치를 조정합니다.
조정 후 과부하 시 이송 동작이 즉시 멈추지 않으면 즉시 원인을 확인하고 스프링 압력을 적절한 강도로 조정하세요. 필요한 경우 스프링을 교체합니다.
V. 반전 메커니즘
후진 메커니즘은 주축의 회전 방향, 캐리지 및 크로스 슬라이드의 이송 방향 등 기계의 움직이는 부품의 동작 방향을 변경하는 데 사용됩니다. CA6140 선반에는 다음과 같은 유형의 반전 메커니즘이 있습니다.
1. 슬라이딩 기어 반전 메커니즘
그림 9a는 슬라이딩 기어 후진 메커니즘을 보여줍니다. 슬라이딩 기어 Z 2 가 표시된 위치에 있으면 모션이 Z에서 전송됩니다. 3 중간 기어 Z를 통해 0 Z 2 를 누르면 샤프트 II가 샤프트 I과 같은 방향으로 회전하고, Z 2 가 점선 위치로 왼쪽으로 이동하면 Z와 직접 맞물립니다. 1 로 설정하고, 샤프트 II는 샤프트 I과 반대 방향으로 회전합니다.
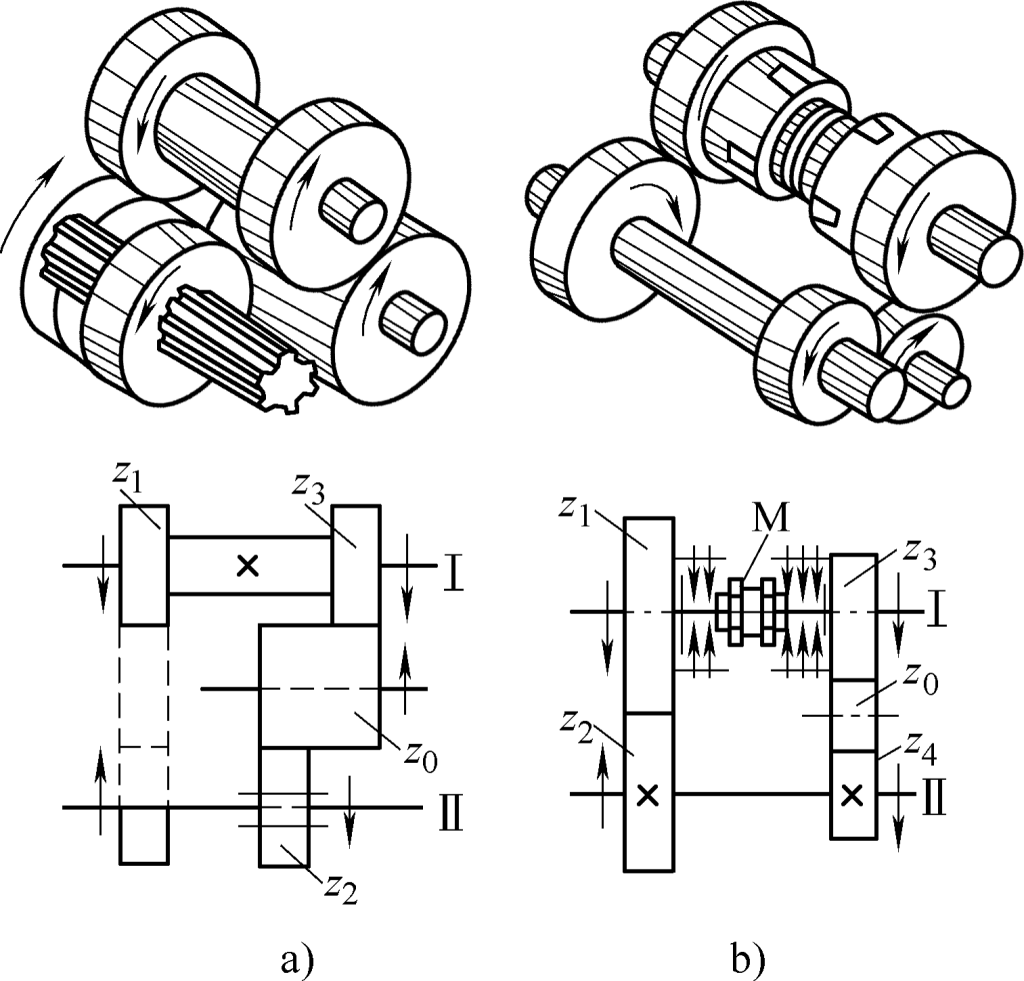
a) 슬라이딩 기어 후진 메커니즘
b) 원통형 기어와 마찰 클러치로 구성된 후진 메커니즘
그림 10에서 볼 수 있듯이, 기어 Z33 , Z25 , Z33 주축의 샤프트 XI, X, XI는 슬라이딩 기어 반전 메커니즘을 형성하여 리드 스크류의 회전 방향을 변경하여 왼쪽 및 오른쪽 나사 절삭을 가능하게 합니다.
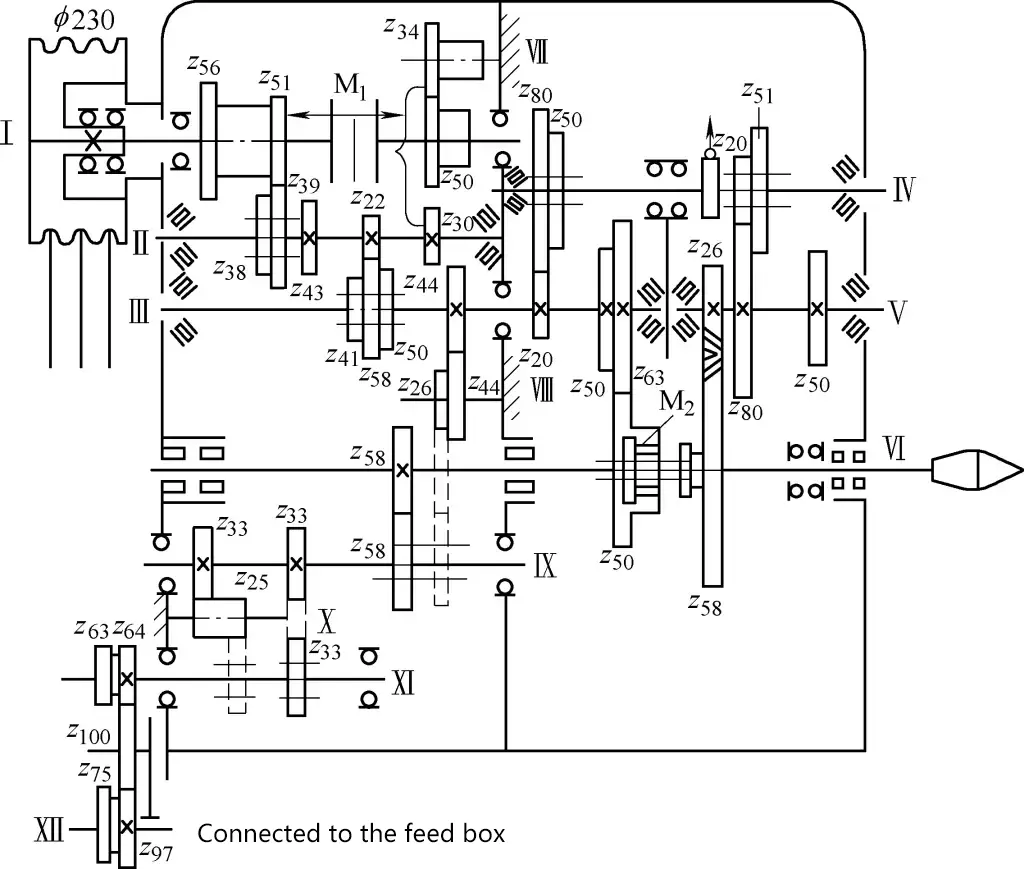
2. 원통형 기어와 마찰 클러치로 구성된 후진 메커니즘
그림 9b는 원통형 기어와 마찰 클러치로 구성된 후진 메커니즘을 보여줍니다. 클러치 M이 왼쪽으로 맞물리면 샤프트 II가 샤프트 I과 반대 방향으로 회전하고, 클러치 M이 오른쪽으로 맞물리면 샤프트 II가 샤프트 I과 같은 방향으로 회전하는 등 M에 의해 형성된 후진 메커니즘은 다음과 같습니다.1 및 Z51 Z43 , Z34 Z50 Z30 를 주축의 샤프트 I, II, VII에 표시합니다(그림 10 참조).
VI. 제어 메커니즘
선반 제어 메커니즘의 기능은 클러치와 슬라이딩 기어의 결합 위치를 변경하여 주 동작과 이송 동작의 시작, 정지, 속도 변경 및 방향 변경을 달성하는 것입니다.
조작을 용이하게 하기 위해 간단한 포크 제어 외에도 하나의 핸들로 여러 변속기 구성 요소(슬라이딩 기어, 클러치 등)를 제어하는 중앙 집중식 제어 방식이 자주 사용되어 핸들 수를 줄이고 조작이 더 쉬워집니다.
1. 메인 스핀들 속도 제어 메커니즘
그림 11은 CA6140 선반의 스핀들 속도 제어 메커니즘을 보여줍니다. 주축대 내부에는 두 세트의 기어 A와 B가 있습니다. 이중 연결 기어 A는 왼쪽과 오른쪽 두 개의 맞물림 위치가 있고, 삼중 연결 기어 B는 왼쪽, 가운데, 오른쪽 세 개의 맞물림 위치가 있습니다. 두 세트의 슬라이딩 기어는 주축대 전면에 설치된 핸들 6으로 제어할 수 있습니다.
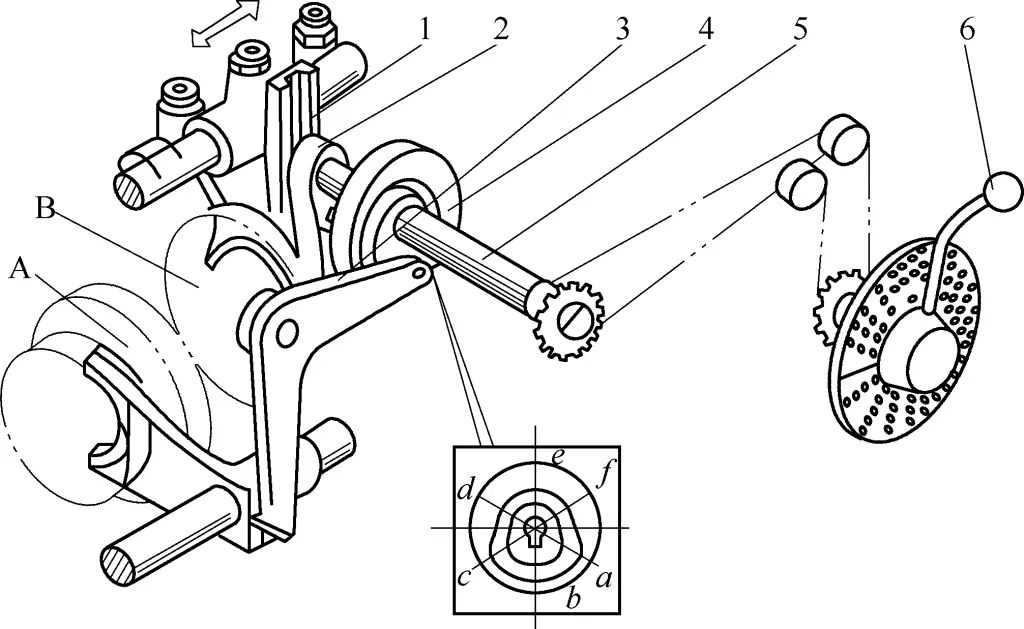
1-시프트 포크
2-크랭크
3레버
4-Cam
5-샤프트
6-핸들
핸들은 체인 드라이브를 통해 샤프트 5를 회전시키며 디스크 캠 4와 크랭크 2는 샤프트에 고정되어 있습니다. 캠에는 닫힌 곡선형 홈이 있으며(그림 11에서 6개의 위치 a~f로 표시), 위치 a, b, c는 반경이 더 크고 위치 d, e, f는 반경이 더 작습니다. 캠 홈은 레버 3을 통해 더블 링크 기어 A를 제어합니다.
레버의 롤러가 캠 커브의 큰 반경 부분에 있으면 기어 A가 왼쪽 위치에 있고, 작은 반경 부분에 있으면 오른쪽 위치로 이동합니다. 크랭크의 원형 핀과 롤러는 시프트 포크 1의 긴 슬롯에 설치됩니다. 크랭크가 샤프트와 함께 회전하면 슬라이딩 기어 B를 변속하여 기어 B를 왼쪽, 가운데, 오른쪽의 세 가지 위치에 배치할 수 있습니다.
핸들의 회전과 크랭크와 레버의 조율된 동작을 통해 기어 A와 B의 축 위치가 6가지로 조합되어 6가지의 속도를 낼 수 있습니다. 따라서 싱글 핸들 6단 제어 메커니즘이라고도 합니다.
2. 세로 및 가로 전력 공급 제어 메커니즘
그림 12는 CA6140 선반의 종방향 및 횡방향 이송 제어 메커니즘을 보여줍니다. 단일 핸들을 사용하여 종방향 및 횡방향 동력 이송 이동의 결합, 분리 및 방향 반전을 중앙에서 제어할 수 있습니다. 핸들의 이동 방향이 공구 캐리지 이동 방향과 일치하므로 사용하기가 매우 편리합니다.
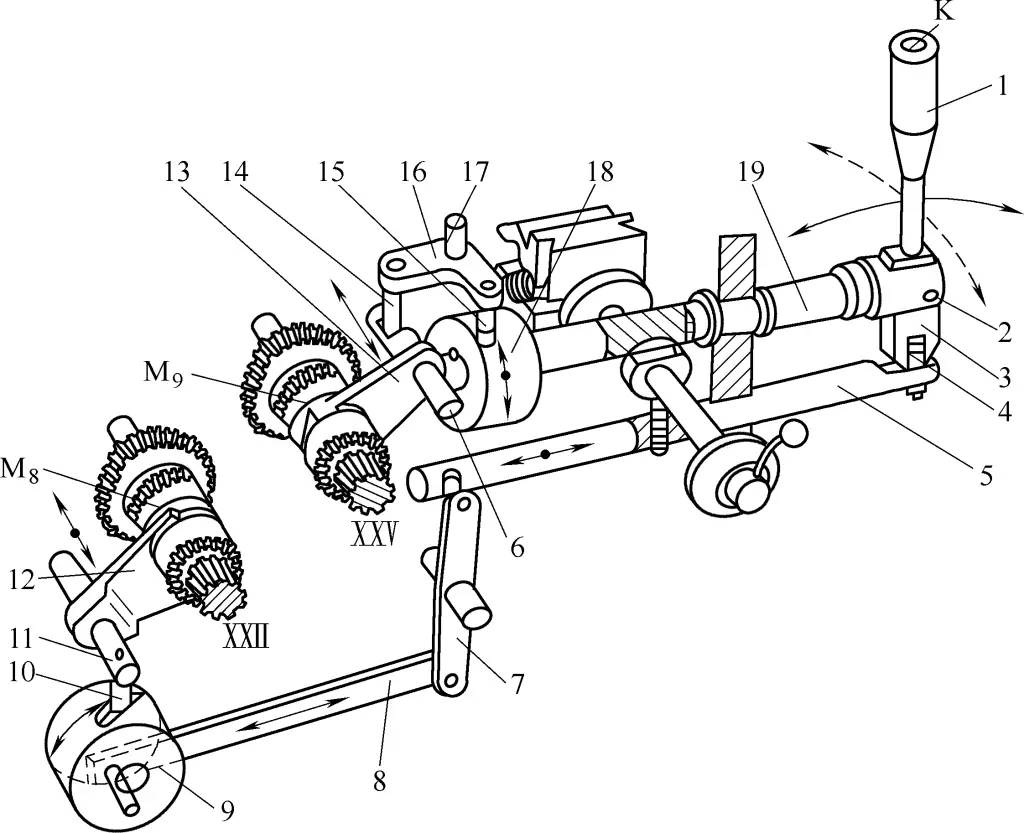
1-핸들
2, 17핀 샤프트
3-핸들 시트
4-볼 헤드 핀
5, 6, 11, 19-샤프트
7, 16-레버
8-커넥팅 로드
9, 18-Cams
10, 14, 15핀
12, 13-시프트 포크
핸들(1)을 좌우로 움직여 핸들 시트(3)가 핀 샤프트(2)를 중심으로 흔들리면(핀 샤프트는 축 고정 샤프트(19)에 장착됨), 핸들 시트 하단의 개방 슬롯이 볼 헤드 핀(4)을 통해 샤프트(5)를 축 방향으로 이동시킨 다음 레버(7)와 연결 로드(8)를 통해 원통형 캠(9)을 회전시킵니다.
그런 다음 원통형 캠의 곡선 홈이 핀 10을 통해 샤프트 11과 그 위에 고정된 시프트 포크 12를 앞뒤로 움직여 시프트 포크가 클러치 M을 움직이게 합니다. 8 를 눌러 샤프트 ⅩⅫ의 두 유휴 기어 중 하나와 맞물리게 합니다. 이렇게 하면 세로 동력 이송 이동이 작동하고 공구 캐리지가 그에 따라 세로 이송을 위해 왼쪽 또는 오른쪽으로 이동합니다.
핸들을 앞뒤로 움직여 샤프트 19와 왼쪽 끝에 고정된 원통형 캠 18이 핸들 시트를 통해 회전하면 캠의 곡선 홈이 핀 샤프트 17을 통해 핀 15를 중심으로 레버 16이 회전하게 됩니다.
그런 다음 레버의 다른 핀 14를 통해 샤프트 6과 그 위에 고정된 시프트 포크(13)를 앞뒤로 움직여 시프트 포크가 클러치 M을 움직이게 합니다. 9 를 눌러 샤프트 XXV의 두 유휴 기어 중 하나와 맞물리게 합니다. 이렇게 하면 횡방향 동력 이송 이동이 작동하고 공구 캐리지가 그에 따라 횡방향 이송을 위해 앞뒤로 이동합니다.
핸들이 가운데 똑바로 세운 위치에 있을 때 양쪽 클러치 M 8 및 M 9 가 중간 위치에 있고 동력 이송 체인이 해제된 상태입니다. 핸들을 왼쪽, 오른쪽, 전진 또는 후진 위치로 이동한 상태에서 핸들 상단의 버튼 K를 누르면 급속 이송 모터가 작동하고 공구 캐리지가 해당 방향으로 빠르게 이동합니다.
VII. 분할 너트 메커니즘
스플릿 너트 메커니즘의 기능은 리드 스크루에서 모션을 결합하거나 분리하는 것입니다. 나사산이나 웜을 절단할 때 분할 너트가 체결되고 리드 스크루가 분할 너트를 통해 캐리지와 공구 기둥을 구동합니다.
분할 너트 메커니즘의 구조는 그림 13에 나와 있습니다. 상하반 너트 1과 2는 캐리지 뒷벽의 도브테일 가이드에 설치되며 위아래로 움직일 수 있습니다. 각 하프 너트 뒷면에는 원통형 핀 3이 설치되어 있으며, 돌출된 끝이 슬롯 디스크 4의 두 개의 곡선 슬롯에 삽입됩니다.
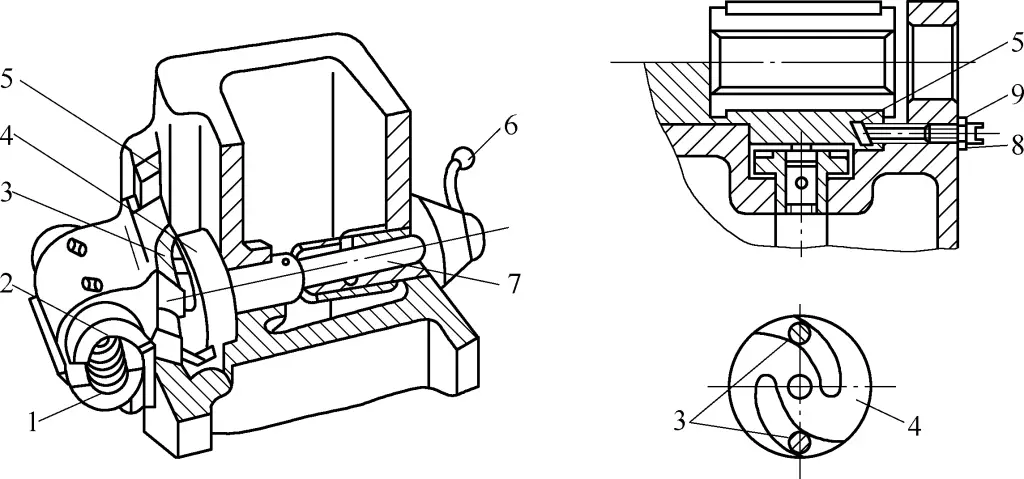
1, 2-하프 견과류
3-원통형 핀
4 슬롯 디스크
5 인레이 스트립
6-핸들
7-샤프트
8-나사
9-넛
핸들 6을 오른쪽으로 움직여 슬롯 디스크가 샤프트 7을 통해 시계 반대 방향으로 회전하면 곡선형 슬롯이 두 개의 원통형 핀을 서로 가깝게 움직이게 하여 상부 및 하부 너트가 리드 스크류와 맞물리게 합니다. 그러면 공구 포스트가 리드 스크류 너트에 의해 구동되는 캐리지를 통과합니다. 슬롯 디스크가 시계 방향으로 회전하면 곡선형 슬롯이 원통형 핀을 통해 두 개의 하프 너트를 분리하여 리드 스크루에서 두 개의 하프 너트가 분리되고 공구 포스트가 이송을 멈춥니다.
분할 너트와 인레이 스트립이 제대로 맞지 않으면 나사 절삭의 정확도에 영향을 미치고 분할 너트 제어 핸들이 자동으로 위치를 이동하여 피치가 고르지 않거나 나사산이 혼란스럽거나 분할 너트 샤프트의 축 방향 이동이 발생할 수도 있습니다.
분할 너트와 도브테일 가이드 사이의 간격(일반적으로 0.03mm 미만이어야 함)은 나사 8로 인레이 스트립 5를 조이거나 풀어서 조정한 후 너트 9로 잠그면 됩니다.
VIII. 인터록 메커니즘
동안 선반 작동작동 오류로 인해 리드 스크류 드라이브와 종방향/횡방향 동력 이송(또는 급속 이송)이 동시에 작동하면 선반이 손상될 수 있습니다. 이러한 사고를 방지하기 위해 캐리지에 인터록 메커니즘이 있어 분할 너트가 체결되면 동력 이송이 체결되지 않고 반대로 동력 이송이 체결되면 분할 너트가 체결되지 않도록 보장합니다.
CA6140 선반의 인터록 메커니즘의 작동 원리는 그림 14에 나와 있습니다(그림 12 참조). 분할 너트 제어 핸들 1(그림 13의 샤프트 7)에는 고정 슬리브 3, 볼 헤드 핀 4, 스프링 5가 세로 동력 이송 제어 샤프트 6에 설치된 숄더 T가 있습니다.
1, 2, 6-샤프트
3 고정 슬리브
4-볼 헤드 핀
5-Spring
그림 14a는 동력 공급과 리드 스크류 드라이브가 모두 해제된 상황을 보여줍니다. 분할 너트를 체결할 때 샤프트 2가 비스듬히 회전하면(그림 14b 참조) 숄더 T가 횡방향 동력 공급 제어 샤프트 1(그림 12의 샤프트 19)의 슬롯에 끼워져 잠기고 회전을 방지하여 횡방향 동력 공급의 체결을 방지합니다.
동시에 숄더 T는 고정 슬리브 3의 수평 구멍에 있는 볼 헤드 핀 4를 아래쪽으로 밀어 넣어 하단을 샤프트 6(그림 12의 샤프트 5)의 구멍에 삽입하여 샤프트를 고정하고 횡방향 동력 피드와 맞물리지 않도록 합니다.
세로 동력 공급이 맞물리면(그림 14c 참조) 샤프트가 축 방향으로 움직이면서 구멍이 더 이상 볼 헤드 핀과 정렬되지 않아 볼 헤드 핀이 아래쪽으로 움직이지 않게 됩니다. 이렇게 하면 스플릿 너트 핸들 샤프트가 회전하지 않아 스플릿 너트가 체결되지 않습니다.
횡방향 동력 공급이 맞물리면(그림 14d 참조) 샤프트가 특정 각도로 회전함에 따라 홈이 더 이상 샤프트의 숄더 T와 정렬되지 않아 샤프트 회전을 방지하여 분할 너트가 맞물리지 않게 됩니다.
IX. 크로스 슬라이드 리드 스크류와 너트 사이의 간격 조정
크로스 슬라이드 리드 스크류의 구조는 그림 15에 나와 있으며, 전면 너트 1과 후면 너트 6으로 구성되어 있으며, 각각 나사 2와 4로 크로스 슬라이드 5의 상단에 고정되고 그 사이에 쐐기 블록 8이 있습니다.
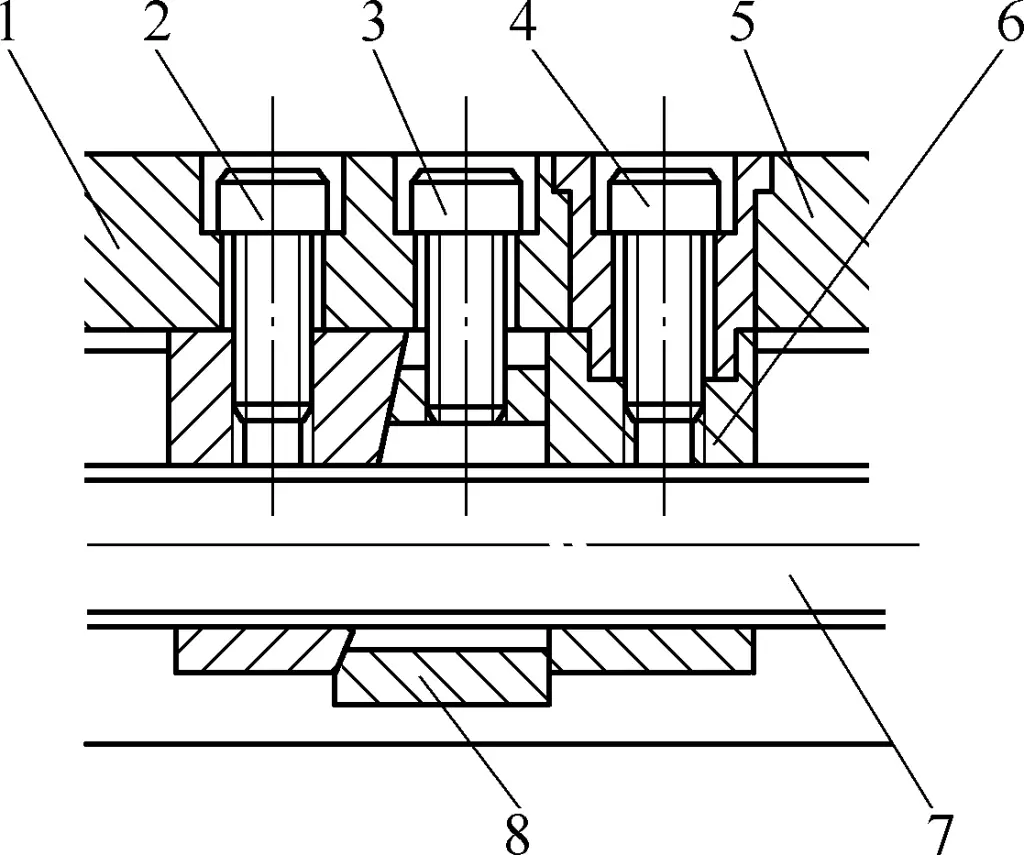
1-프런트 너트
2~4-나사
5-크로스 슬라이드
6-리어 너트
7-리드 나사
8-웨지 블록
리드 스크류 7과 너트 나사산 사이의 간격이 마모되어 너무 커지면 전면 너트의 고정 나사를 풀고 나사 3을 조인 다음 웨지 블록을 위로 당깁니다. 쐐기 작용으로 너트가 왼쪽으로 밀려나면서 리드 스크류와 너트 나사산 사이의 간격이 줄어듭니다.
조정 후 크로스 슬라이드 리드 스크류 핸들은 전진 및 후진 방향 모두에서 백래시가 1/20 미만인 상태에서 부드럽게 회전해야 합니다. 적절하게 조정한 후 나사 2를 조입니다.