TIG 스폿 용접 101: 원리, 특성 및 용도
정확한 정밀도로 용접하여 재료 자체만큼이나 튼튼한 접합부를 만든다고 상상해 보세요. 이것이 바로 TIG 스폿 용접의 본질입니다....
스폿 용접에서 로봇이 사람의 손을 대체할 수 있을까요? 이 글에서는 스폿 용접 로봇의 구성 요소와 기능을 살펴보고 기술 사양, 제어 시스템 및 용접 집게에 대해 자세히 설명합니다. 독자들은 이 로봇이 어떻게 용접 정확도, 속도, 부하 용량을 향상시켜 제조 공정을 변화시키는지 알게 될 것입니다. 최신 스폿 용접 로봇을 구동하는 최첨단 기술과 산업 효율성에 미치는 영향에 대해 알아보세요.

용접 공정 측면에서 현재 가장 널리 사용되는 용접 로봇에는 아크 용접, 스폿 용접, 레이저 용접 로봇이 있습니다. 스폿 용접 로봇은 자동화된 스폿 용접 작업에 사용되는 산업용 로봇을 말하며, 스폿 용접 집게가 장착된 산업용 로봇의 일종으로 해석할 수 있습니다.
가반 하중이 165kg인 6축 야스카와 스폿 용접 로봇의 예를 들어 로봇의 외관은 그림 2-1과 같습니다(첨부된 CD 동영상 - (1) 로봇 제작 과정 참조).
실제 사용에서 로봇은 거의 전적으로 다음을 수행하는 데 사용됩니다. 스폿 용접 30~50mm 간격으로 작동하기 때문에 이동 중에 최대 속도에 도달하는 경우는 거의 없습니다. 따라서 가능한 한 짧은 시간 내에 빈번한 단시간 토크 시작 및 정지의 성능을 개선하는 것이 로봇의 핵심 과제입니다.
가속 및 감속을 증가시키기 위해 설계에서 암의 무게를 줄이고 드라이브 시스템의 출력 토크를 높였습니다. 동시에 지연 시간을 줄이고 높은 정적 위치 정확도를 달성하기 위해 이 모델은 저관성, 고강성 감속기, 고출력 브러시리스 서보 모터를 사용합니다.
제어 회로에 피드포워드 보정, 상태 관찰기 등의 대책을 채용하여 제어 성능을 크게 향상시켰으며, 50mm 근거리 이동 시 위치 결정 시간을 0.4초 이내로 단축했습니다. 일반적으로 사용되는 MOTOMAN ES165D 다관절 스폿 용접 로봇 본체의 기술 사양은 표 2-1에 나와 있습니다.
스폿 용접 로봇 제어 시스템은 본체 제어부와 용접 제어부로 구성됩니다. 본체 제어부는 주로 티칭 펜던트, 제어 캐비닛, 로봇 암으로 구성됩니다.
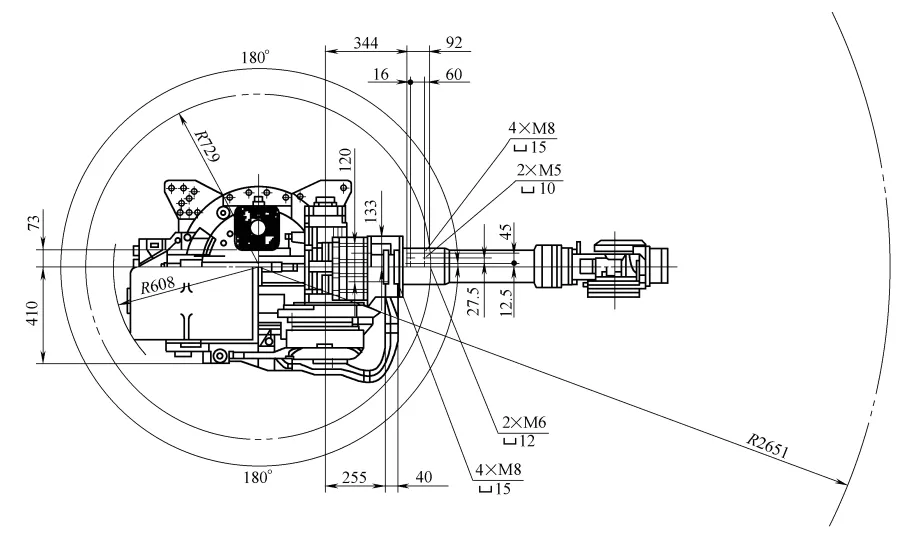
용접 제어부는 용접 클램프 압력 시간 및 프로그램 전환 외에도 주회로 사이리스터의 전도 각도를 변경하여 용접 전류를 제어합니다. 그림 2-2의 윗면에는 로봇 본체의 YRES0165DA00 팔 동작 범위가 표시되어 있습니다.

표 2-1: MOTOMAN-ES165D 굴절식 스폿 용접 로봇의 기술 사양
| 이름 | 모토맨 ES165D | |
| 유형 | YR-ES0165DA00 | |
| 구조 | 수직 멀티 조인트 타입(6자유도) | |
| 페이로드 | 165kg(151.5kg) * 3 | |
| 반복성 *1 | ±0.2mm | |
| 동작 범위 | S축(회전) | -180°~+180° |
| L축(아래팔) | -60°~+76° | |
| U축(상완) | -142.5°~+230° | |
| R축(손목 회전) | -360°~+360°(-205°~+205°)*3 | |
| B축(손목 스윙) | -130°~+130°(-120°~+120°)*3 | |
| T축(손목 비틀기) | -360°~+360°(-180°~+180°)*3 | |
| 최대 속도 | S축(회전) | 1.92rad/s, 110°/s |
| L축(아래팔) | 1.92rad/s, 110°/s | |
| U축(상완) | 1.92rad/s, 110°/s | |
| R축(손목 회전) | 3.05rad/s, 175°/s | |
| B축(손목 스윙) | 2.62rad/s, 150°/s | |
| T축(손목 비틀기) | 4.19rad/s, 240°/s | |
| 허용 관성 모멘트(GD²/4) | R축(손목 회전) | 921N m(868N m)*3 |
| B축(손목 스윙) | 921N m(868N m)*3 | |
| T축(손목 비틀기) | 490N m | |
| 허용 관성 모멘트 | R축(손목 회전) | 85kg - m²(83kg - m²) *3 |
| B축(손목 스윙) | 85kg m²(83kg m²)*3 | |
| T축(손목 비틀기) | 45kg - m2 | |
| 로봇의 무게 | 1100KG | |
| 설치 환경 | 온도 | 0° ~ +45° |
| 습도 | 20% ~ 80% RH(비응축) | |
| 진동 | 4.9m/s 미만2 | |
| 기타 | 1. 부식성 가스나 액체, 인화성 가스로부터 멀리 떨어뜨려 보관하세요. 2. 물, 기름, 먼지가 닿지 않는 곳에 보관하세요. 3. 전기적 소음원으로부터 멀리 떨어진 곳에 보관 | |
| 전력 용량 *2 | 5.0kV A | |
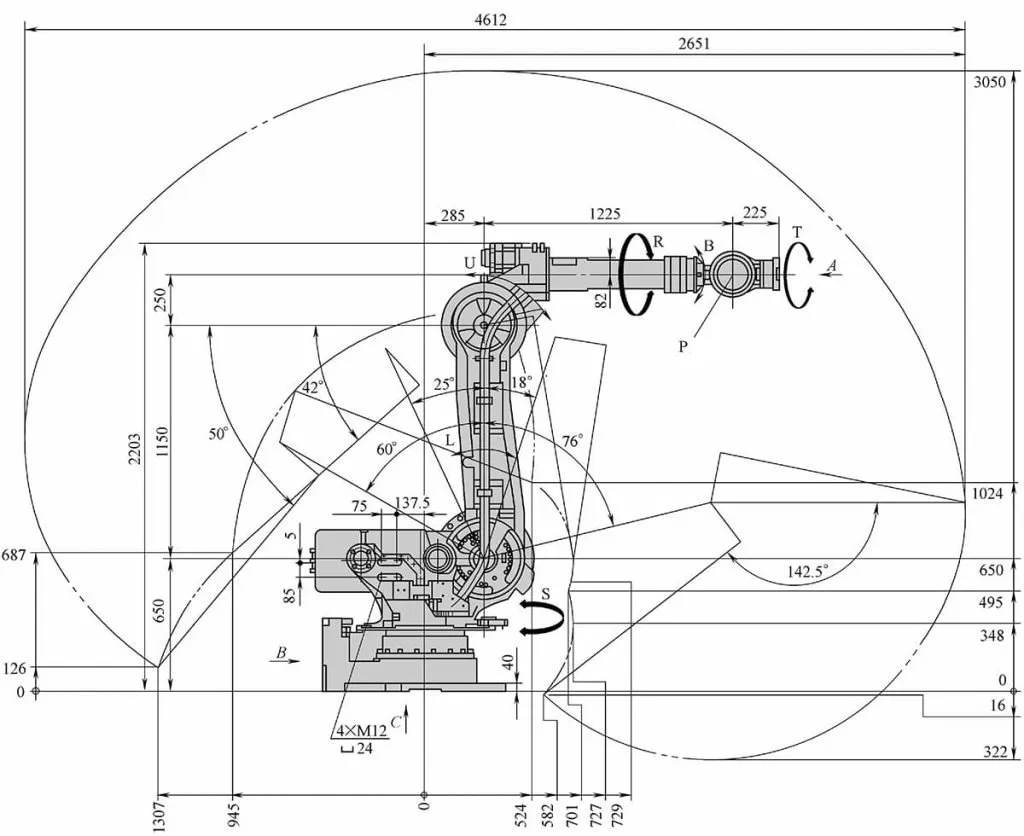
로봇 본체 YRES0165DA00의 팔 동작 범위 측면도는 그림 2-3에 나와 있습니다.
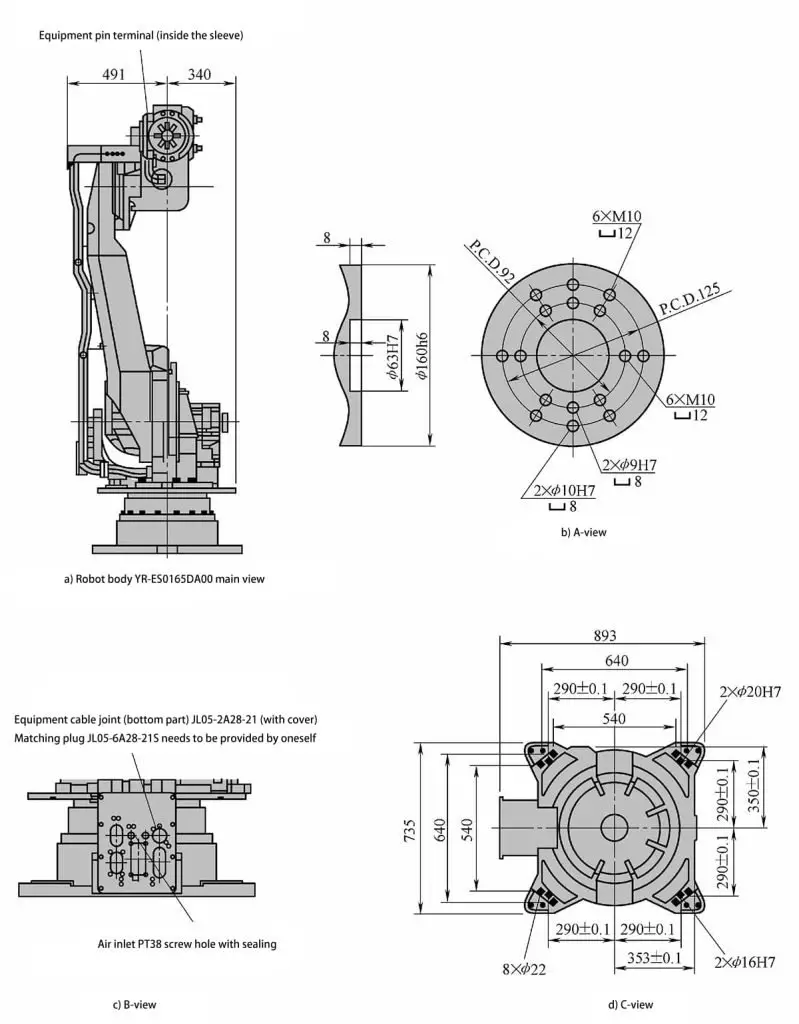
그림 2-4는 로봇 본체 YRES0165DA00의 전면 모습과 A, B, C 방향의 단면도를 보여줍니다.
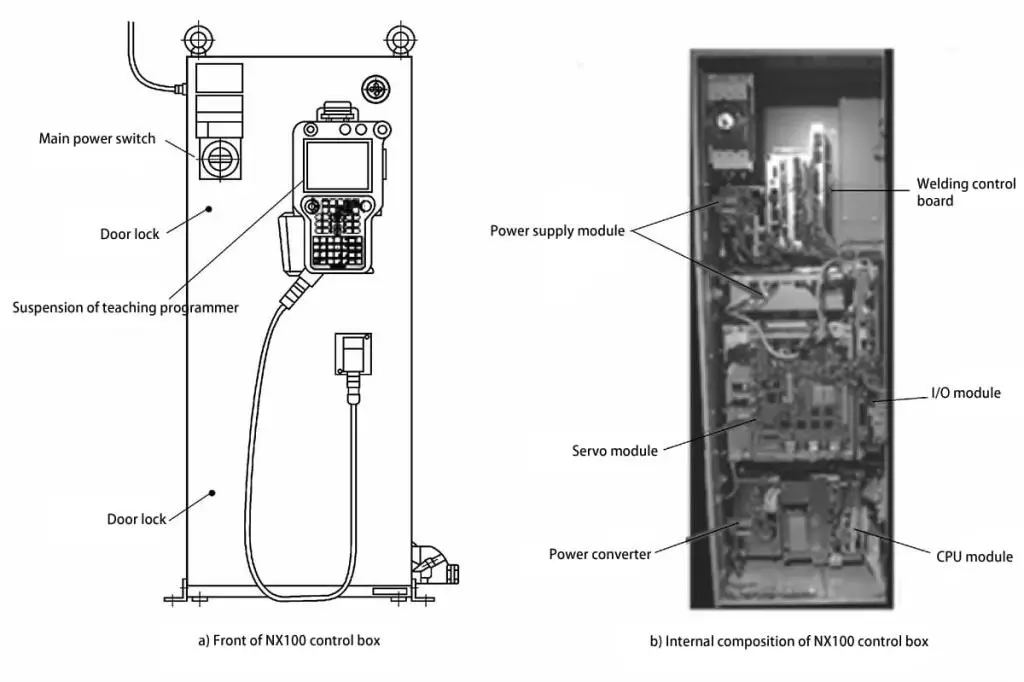
NX100 로봇 제어 캐비닛의 전면 및 내부 구조는 그림 2-5에 나와 있습니다.
그림 2-5에서 전원 공급 모듈에는 주 전원 공급 장치, 용접 명령 보드에는 I/F 장치 용접 데이터베이스 및 프로그램 저장소, 서보 모듈에는 서보 동작 증폭 구동 회로, 전원 변환기는 제어 캐비닛 장치에 전원을 공급하고, 입출력 모듈에는 입출력 회로 및 인터페이스, CPU 모듈에는 제어 보드, 백플레인, 타이밍 제어 보드 및 제어 전원 공급 장치가 포함되어 있습니다.
제어 캐비닛 도어를 열 때는 스위치 핸들을 꺼짐으로 설정해야 합니다. 그런 다음 일자 드라이버를 사용하여 도어 잠금 장치를 돌립니다(도어에는 두 개의 잠금 장치가 있습니다. 시계 방향으로 돌리면 잠금 해제, 반시계 방향으로 돌리면 잠금). 문을 연 상태에서 문을 잡고 일자 드라이버를 사용하여 도어록을 돌립니다. 문을 닫은 후 '딸깍' 소리가 나면 문이 단단히 잠긴 것입니다.
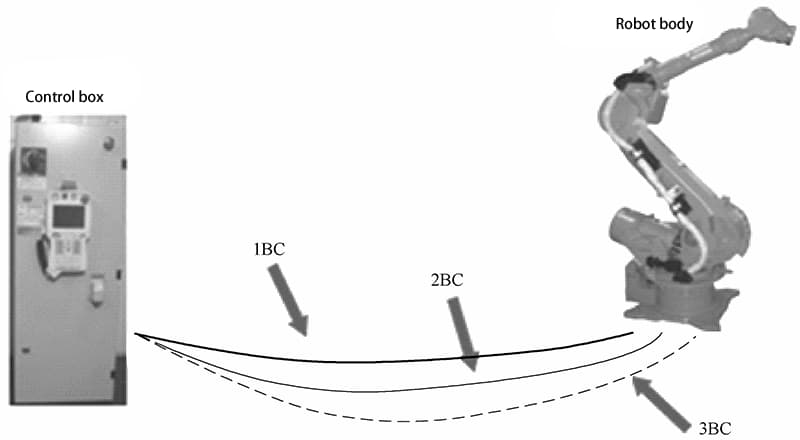
용접 로봇 본체는 그림 2-6과 같이 인코더 피드백 신호와 로봇 서보 모터 구동 신호를 전송하기 위해 1BC, 2BC 및 3BC 케이블을 통해 제어 박스에 연결됩니다.
스폿 용접은 아크 용접 로봇에 비해 사용되는 로봇에 대한 요구 사항이 덜 까다롭습니다. 스폿 용접은 점 대 점 제어만 필요하고 점과 점 사이의 용접 집게의 이동 궤적에 대한 엄격한 요구 사항이 없기 때문입니다.
이것이 로봇이 처음에 스폿 용접에만 사용되었던 이유이기도 합니다. 스폿 용접 로봇은 충분한 하중 용량이 필요할 뿐만 아니라 정확한 위치 지정으로 지점 간 빠르고 원활하게 이동해야 이동 시간을 줄이고 작업 효율성을 향상시킬 수 있습니다.
스폿 용접 로봇에 필요한 하중은 사용되는 용접 집게의 종류에 따라 다릅니다. 변압기 분리에 사용되는 용접 집게의 경우 30.5kg의 하중이면 충분합니다. 그러나 이러한 집게는 메인 보조 케이블의 길이에 의해 제한되어 에너지 손실이 발생하고 로봇이 공작물의 내부 용접을 위해 집게를 확장하기 어렵습니다.
또한 로봇의 움직임에 따라 케이블이 계속 흔들리기 때문에 케이블이 빠르게 손상될 수 있습니다. 따라서 최신 애플리케이션에서는 통합형 용접 집게를 사용하는 경우가 많으며, 이 집게의 무게는 일반적으로 약 10kg입니다.
로봇이 용접 집게를 용접을 위한 공간 위치로 빠르게 이동하기 위해서는 충분한 하중 용량이 필요하다는 점을 고려하여 일반적으로 100~165kg의 하중 용량을 가진 고강도 로봇이 선택됩니다.
연속 스폿 용접 시 용접 집게의 빠른 단거리 이동 요건을 충족하기 위해 새로운 헤비 듀티 로봇에는 0.3초 이내에 50mm 변위를 완료할 수 있는 기능이 장착되었습니다. 이로 인해 모터 성능, 마이크로컴퓨터 처리 속도 및 알고리즘에 대한 요구 사항이 더 높아졌습니다.
따라서 스폿 용접 로봇은 안정적인 성능, 넓은 동작 범위, 빠른 이동 속도, 강력한 하중 용량을 갖춰야 합니다. 용접 품질이 현저히 우수하여 스폿 용접 작업의 생산성 향상에 기여해야 합니다.
스폿 용접 로봇에는 외부 장치와의 통신을 위한 인터페이스가 장착되어 있어 상위 제어기 및 관리 컴퓨터로부터 제어 명령을 받을 수 있습니다. 따라서 메인 컴퓨터의 제어 하에 여러 대의 스폿 용접 로봇을 구성하여 유연한 스폿 용접 생산 시스템을 구축할 수 있습니다.
로봇의 실행 도구인 스폿 용접 집게는 로봇의 사용에 상당한 제약을 가합니다. 선택이 합리적이지 않으면 로봇의 작동 효율성과 접근성에 직접적인 영향을 미쳐 로봇 작동의 안전에 심각한 위협이 됩니다.
스폿 용접 로봇 집게의 설계는 생산 요구 사항과 운영 특성에 따라 생산 및 운영 요구 사항을 충족해야 합니다. 로봇 작업과 기존 수작업에는 많은 차이점이 있기 때문에 표 2-2에서 볼 수 있듯이 두 작업 간에는 상당한 차이가 있습니다.
표 2-2: 수동 작동 스폿 용접 건과 로봇 스폿 용접 건의 특성 비교
| 수동 작동 스폿 용접 건 | 로봇 스폿 용접 건 |
| 스폿 용접 총의 무게에 그다지 엄격하지 않음 | 스폿 용접 건은 로봇에 장착되며 각 로봇에는 정격 하중이 있으므로 스폿 용접 건 무게에 대한 엄격한 요구 사항이 있습니다. |
| 다양한 문제를 처리하기 위해 인간의 지능에 크게 의존합니다. | 프로그램에 따라 엄격하게 작동하며 공작물 및 샘플의 다른 위치와 같은 문제를 처리 할 수 있으므로 용접 건에는 작업 자동 추적을 달성하기 위해 자동 보정 기능이 있어야합니다. |
| 용접 건과 작업자 사이의 상대적 위치를 고려할 필요가 없습니다. | 로봇의 이동, 회전, 위치 설정 및 복귀 과정에서 공작물이나 다른 장치와의 충돌을 방지하기 위해 스폿 용접 건은 이동하는 동안 고정된 위치에 있어야 하므로 스폿 용접 건 설계에 제한 메커니즘이 필요합니다. |
| 스폿 용접 총의 동작은 사람이 제어하며 신호 고려가 필요하지 않습니다. | 로봇 스폿 용접 건은 프로그램에 따라 작동하며 각 작업이 끝날 때마다 명령을 내릴 필요가 있으므로 신호로 스폿 용접 건을 제어해야합니다. |
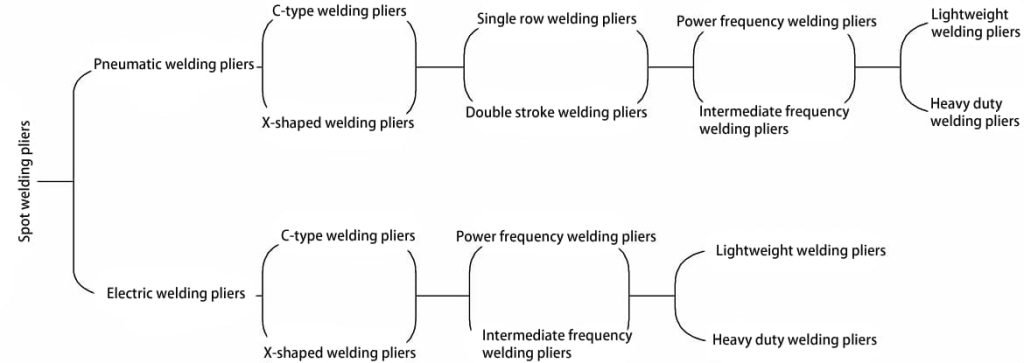
(1) 구조적 형태에 따라 스폿 용접 건은 C 형 용접 건과 X 형 용접 건으로 나눌 수 있습니다.
(2) 스폿 용접 건의 스트로크에 따라 단일 스트로크와 이중 스트로크로 분류 할 수 있습니다.
(3) 가압 구동 방식에 따라 스폿 용접 건은 공압 용접 건과 전기 용접 건으로 분류 할 수 있습니다.
(4) 스폿 용접 건 변압기의 유형에 따라 산업용 주파수 용접 건과 중주파 용접 건으로 분류 할 수 있습니다.
(5) 스폿 용접 건의 가압 력의 크기에 따라 경량 용접 건과 중장비 용접 건으로 나눌 수 있습니다. 일반적으로 전극 압력이 450kg 이상인 스폿 용접 건을 헤비 듀티 용접 건이라고하고 450kg 미만인 용접 건을 경량 용접 건이라고합니다.
스폿 용접 총의 분류를 요약하면 그림 2-7에 나와 있습니다.
1) C형 용접 전극
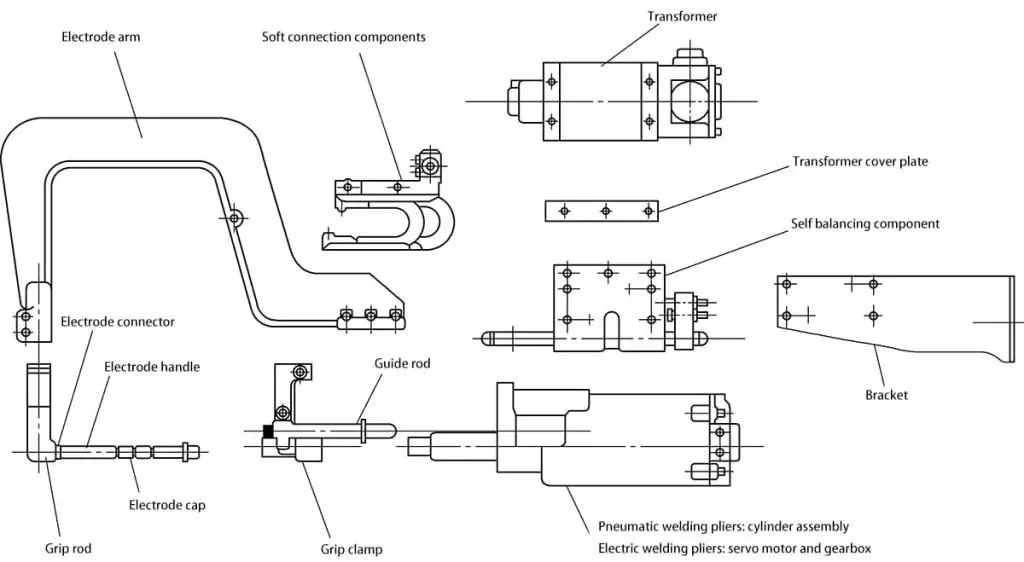
용접 위치에 따라 C형 용접 전극은 주로 수직 및 수직에 가까운 경사 위치에서 스폿 용접에 사용됩니다. C형 용접 전극의 구조와 구성 요소 이름은 그림 2-8에 나와 있습니다.
(2) X형 용접 전극
X형 용접 전극은 주로 수평 및 수평에 가까운 경사 위치에서 스폿 용접에 사용됩니다. X형 용접 전극의 구조와 구성품 이름은 그림 2-9에 나와 있습니다.
스폿 용접 전극의 일반적인 구조 형태는 실제 적용 시 스폿 용접 위치의 특정 특성에 따라 전극 본체를 특수하게 설계해야 합니다. 그래야만 용접 전극이 용접 포인트 위치에 도달할 수 있습니다.
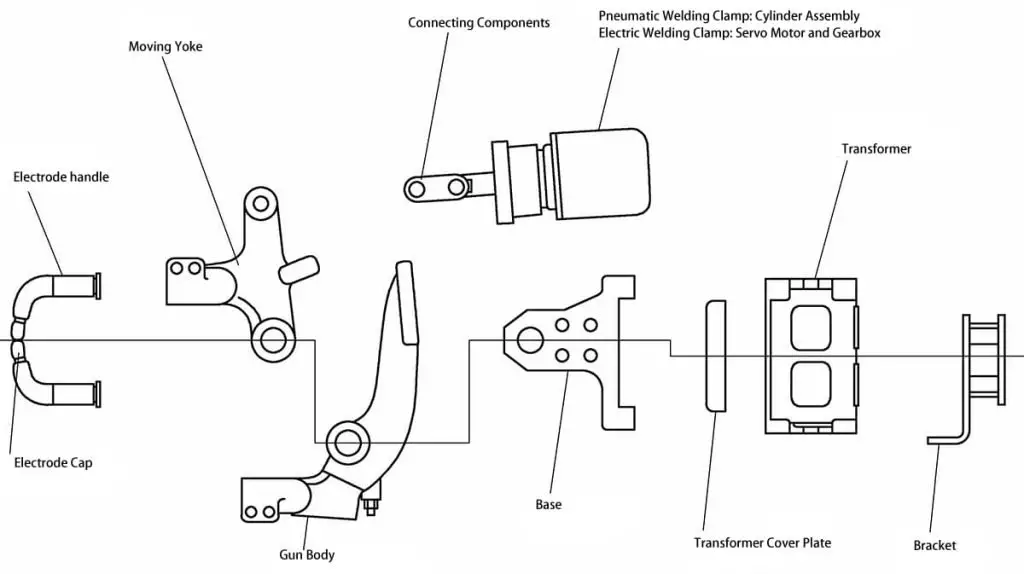
그림 2-9 X형 용접 전극의 구조 및 구성 요소 이름
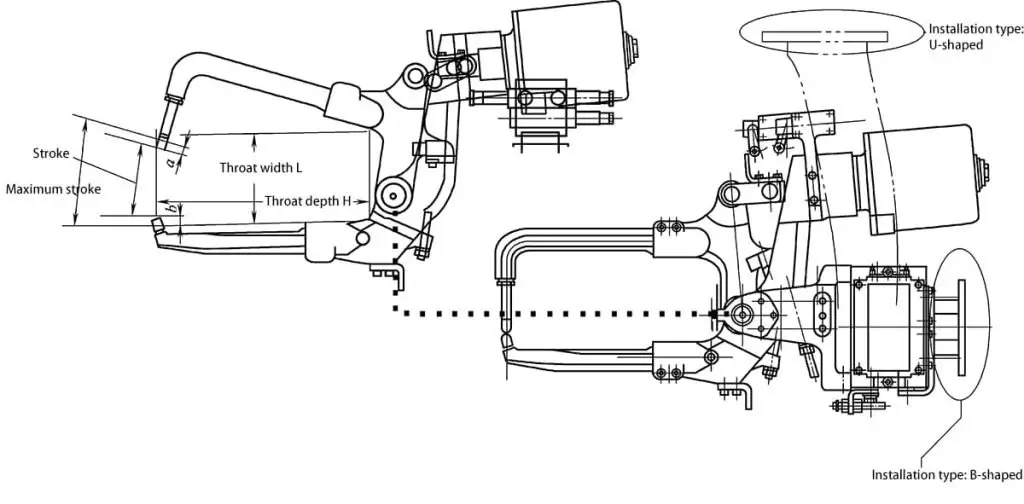
1) C형 공압 용접 전극의 구조 개략도는 그림 2-10에 나와 있습니다.
2) C형 공압 용접 전극의 선택 파라미터는 표 2-3에 나와 있습니다.
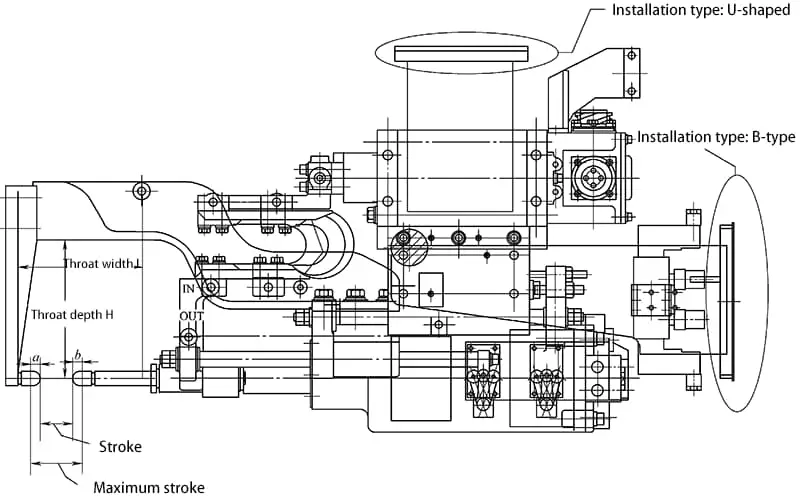
참고: a와 b는 전극으로 인한 스트로크 요구 사항을 나타냅니다. 최대 스트로크에는 a + b뿐만 아니라 전극 핸들의 처짐으로 인한 증가된 요구 사항도 포함됩니다.
표 2-3 C형 공압 용접 전극의 선택 파라미터
| 기본 기술 사양 | 콘텐츠 | 로봇 MOTOMAN-ES165D, MOTOMAN-ES200D, MOTOMAN-ES165RD, MOTOMAN-ES200RD는 두 가지 유형의 용접 클램프 플랜지와 호환됩니다: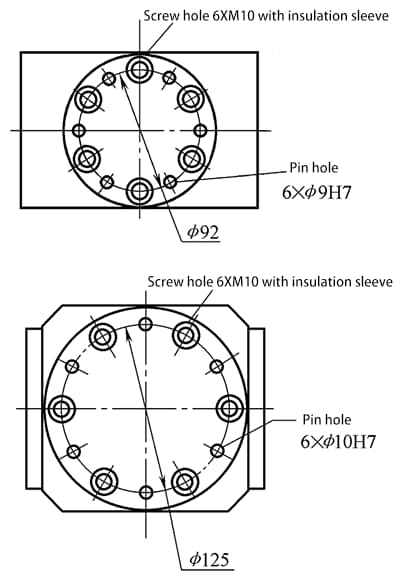 | |
| 용접 클램프 유형 | 공압식 C형 용접 클램프 | ||
| 용접 클램프 본체 | 목구멍 깊이 H/mm | ||
| 목구멍 너비 H/mm | |||
| 스트로크 / mm | |||
| 최대 스트로크 / mm | |||
| 최대 클램핑 힘 /kgf | |||
| 트랜스포머 | 유형(회선 주파수 또는 중주파) | ||
| 용량/kVA | |||
| 최대 전류 | |||
| 클램프 스트로크 유형 | 단일 스트로크 | ||
| 듀얼 스트로크 | |||
| *주: 듀얼 스트로크 용접 클램프를 사용하는 경우, 작은 오프닝 스트로크 / mm | |||
| 로봇에 용접 클램프의 장착 구성 | |||
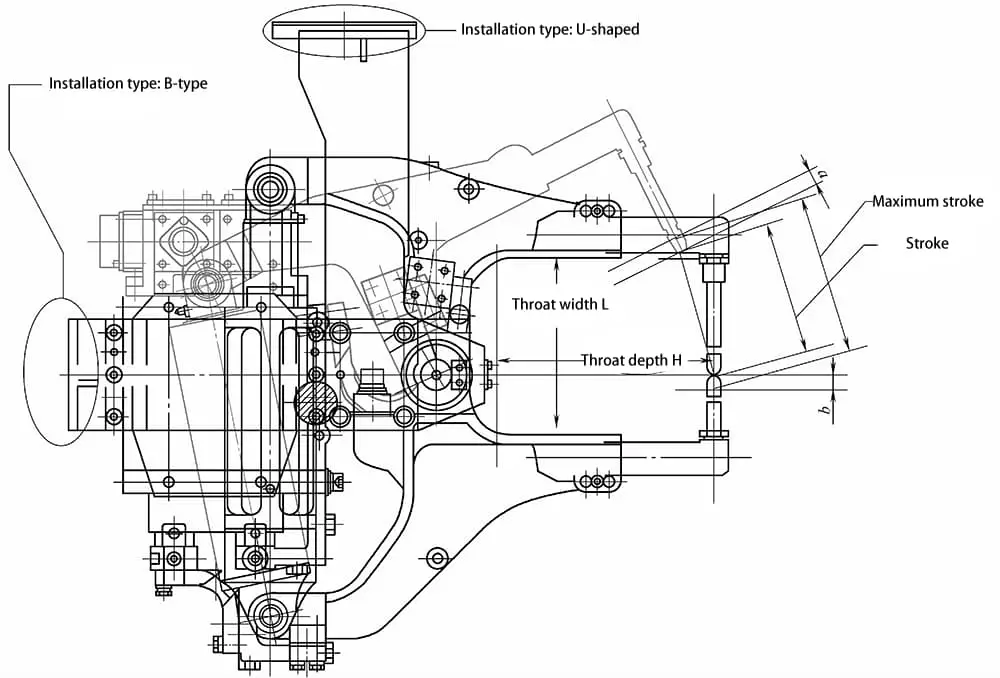
1) C형 전기 용접 클램프 구조의 개략도는 그림 2-11에 나와 있습니다.
2) C형 전기 용접 클램프의 선택 파라미터는 표 2-4를 참조하세요.
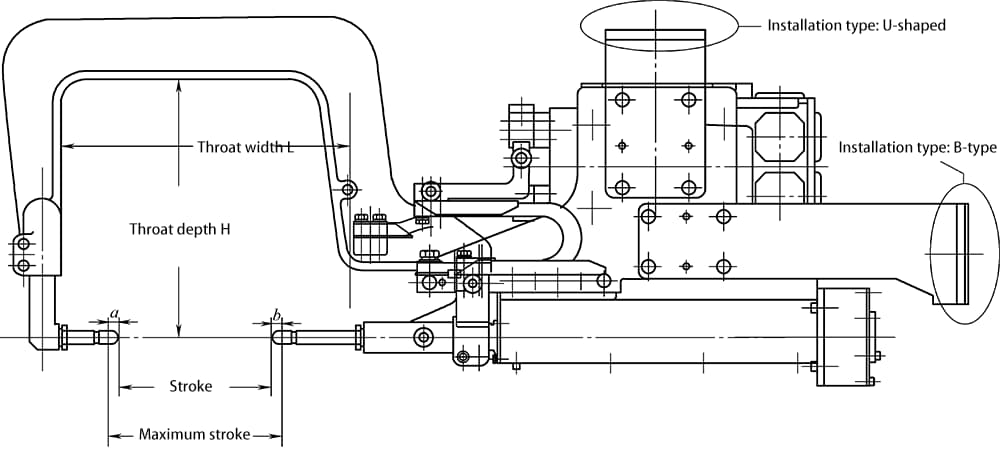
참고: a와 b는 전극으로 인한 스트로크 요구 사항을 나타내며, 최대 스트로크에는 a+b 외에 전극 홀더의 굴곡으로 인한 수요 증가가 포함됩니다.
표 2-4 C형 전기 용접 클램프의 선택 파라미터
| 기본 기술 사양 | 콘텐츠 | 로봇 MOTOMAN-ES165D, MOTOMAN-ES200D, MOTOMAN-ES165RD, MOTOMAN-ES200RD는 두 가지 유형의 용접 클램프 플랜지와 호환됩니다: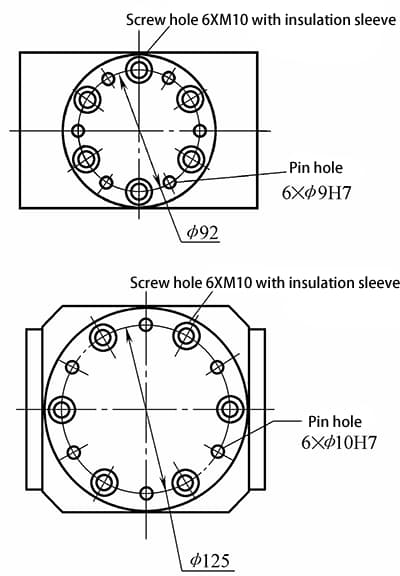 | |
| 용접 클램프 유형 | C형 서보 용접 클램프 | ||
| 용접 클램프 본체 | 목구멍 깊이 H/mm | ||
| 목구멍 너비 H/mm | |||
| 스트로크 / mm | |||
| 최대 스트로크 / mm | |||
| 최대 클램핑 힘 /kgf | |||
| 트랜스포머 | 유형(회선 주파수 또는 중주파) | ||
| 용량/kVA | |||
| 최대 전류 | |||
| 서보 모터 모델 번호 | |||
| 로봇에 용접 클램프의 장착 구성 | |||
1) X형 공압 용접 클램프의 개략도는 그림 2-12에 나와 있습니다.
2) X형 공압 용접 클램프의 선택 매개변수는 표 2-5에 나와 있습니다.
참고: "a"와 "b"는 전극으로 인한 스트로크 요구 사항을 나타내며, 최대 스트로크에는 "a"와 "b" 외에 전극 홀더의 처짐으로 인한 요구 사항도 포함됩니다.
표 2-5: X형 공압 용접 클램프의 선택 파라미터
| 기본 기술 사양 | 콘텐츠 | MOTOMAN-ES165D, MOTOMAN-ES200D, MOTOMAN-ES165RD, MOTOMAN-ES200RD 로봇 바디는 두 가지 유형의 용접 토치 플랜지와 호환됩니다.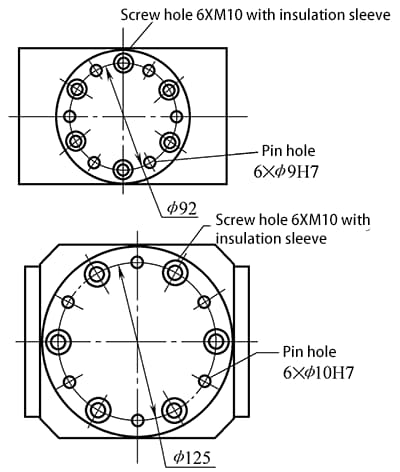 | |
| 용접 클램프 유형 | X형 공압 용접 클램프 | ||
| 용접 클램프 본체 | 목구멍 깊이 H/mm | ||
| 목구멍 너비 H/mm | |||
| 스트로크 / mm | |||
| 최대 스트로크 / mm | |||
| 최대 클램핑 힘 /kgf | |||
| 트랜스포머 | 유형(회선 주파수 또는 중주파) | ||
| 용량/kVA | |||
| 최대 전류 | |||
| 클램프 스트로크 유형 | |||
| *주: 듀얼 스트로크 용접 클램프를 사용하는 경우, 작은 오프닝 스트로크 / mm | |||
| 로봇에 용접 클램프의 장착 구성 | |||
1) X형 전기 용접 클램프의 개략도는 그림 2-13에 나와 있습니다.
2) X형 전기 용접 클램프의 선택 매개변수는 표 2-6에 나와 있습니다.
참고: "a"와 "b"는 전극으로 인한 스트로크 요구 사항을 나타내며, 최대 스트로크에는 "a"와 "b" 외에 전극 홀더의 처짐으로 인한 요구 사항도 포함됩니다.''
표 2-6: X형 전기 용접 클램프의 선택 매개변수
| 기본 기술 사양 | 콘텐츠 | MOTOMAN-ES165D, MOTOMAN-ES200D, MOTOMAN-ES165RD, MOTOMAN-ES200RD 로봇 바디는 두 가지 유형의 용접 토치 플랜지와 호환됩니다.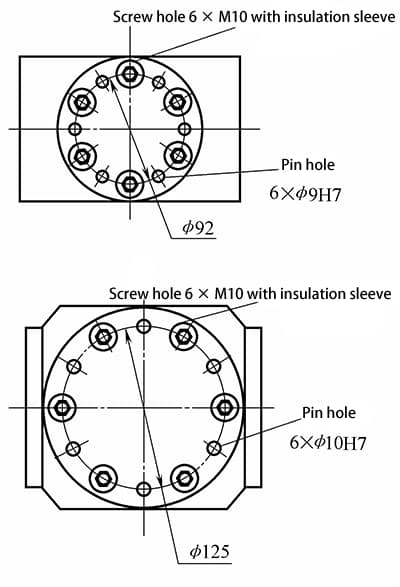 | |
| 용접 클램프 유형 | X형 서보 용접 클램프 | ||
| 용접 클램프 본체 | 목구멍 깊이 H/mm | ||
| 목구멍 너비 H/mm | |||
| 스트로크 / mm | |||
| 최대 스트로크 / mm | |||
| 최대 클램핑 힘 /kgf | |||
| 트랜스포머 | 유형(회선 주파수 또는 중주파) | ||
| 용량/kVA | |||
| 최대 전류 | |||
| 서보 모터 모델 번호 | |||
| 로봇에 용접 클램프의 장착 구성 | |||
X형 공압 용접 클램프와 C형 공압 용접 클램프의 실제 그림은 위의 그림 2-14에 나와 있습니다.
수동 서스펜션 스폿 용접 클램프이든 로봇 스폿 용접 클램프이든 주문 프로세스에는 특정 요구 사항이 있습니다. 공작물에 필요한 용접 사양을 준수해야 합니다. 기본 원칙은 다음과 같습니다:
1) 공작물 및 재료 두께에 따라 용접 클램프 전극의 최대 단락 전류 및 최대 압력을 결정합니다.
2) 공작물의 모양과 공작물의 용접 지점 위치에 따라 용접 클램프 본체의 인입 깊이, 인입 폭, 전극 홀더, 최대 스트로크, 작업 스트로크 등을 결정합니다.
3) 공작물의 모든 용접 포인트 분포에 따라 용접 클램프의 유형을 결정합니다. 용접 클램프에는 일반적으로 싱글 액션 C형 용접 클램프, 더블 액션 C형 용접 클램프, 싱글 액션 X형 용접 클램프 및 더블 액션 X형 용접 클램프의 네 가지 일반적인 유형이 있습니다.
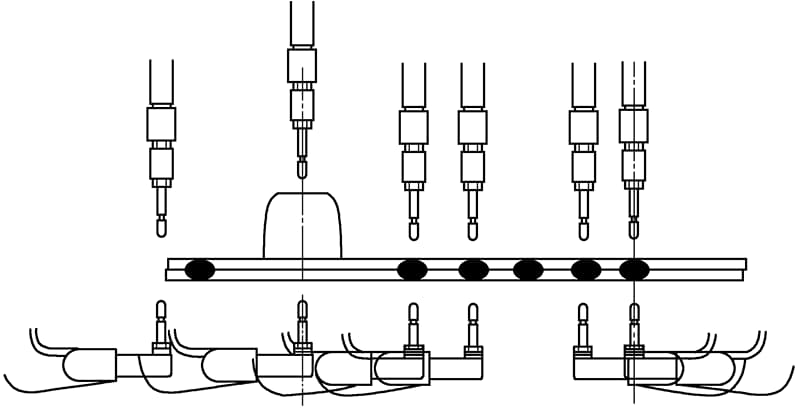
위의 조건에서는 용접 클램프의 무게를 가능한 한 최소화하는 것이 중요합니다. 서스펜션 스폿 용접의 경우 작업자의 노동 강도를 줄일 수 있습니다. 로봇 스폿 용접의 경우 저부하 로봇을 선택하면 생산 효율을 높일 수 있습니다. 공작물의 크기와 용접 위치에 따라 그림 2-15와 같이 큰 간격의 용접 클램프와 작은 간격의 용접 클램프를 선택합니다.
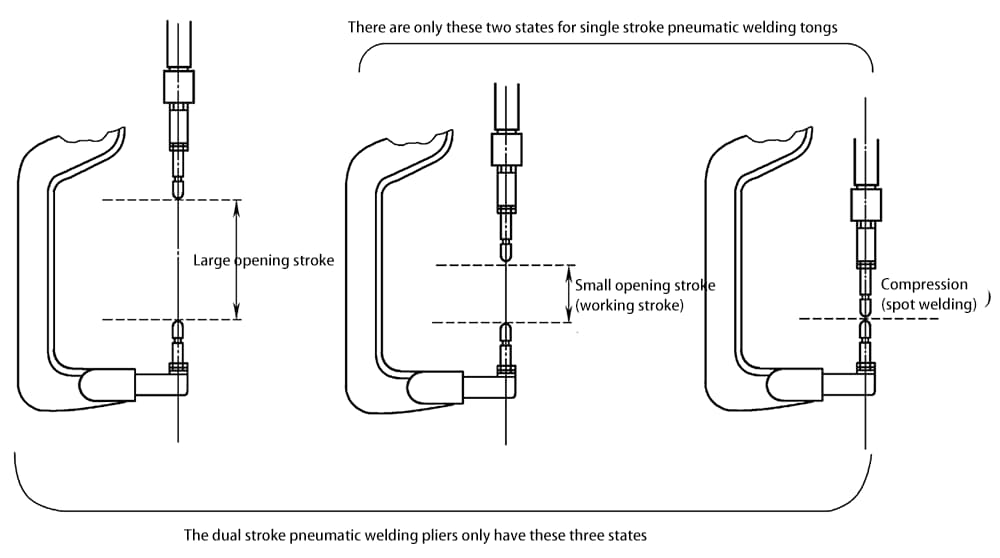
그림 2-16과 같이 공정 요구 사항에 따라 싱글 액션 공압 용접 클램프와 더블 액션 공압 용접 클램프를 선택합니다.
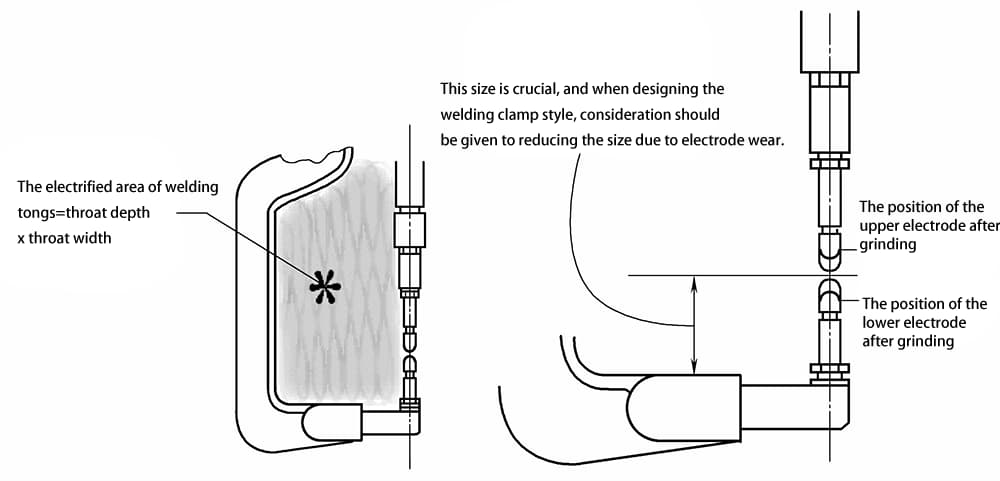
용접 클램프의 통전 면적 = 목구멍 깊이 × 목구멍 너비. 이 면적이 클수록 용접 중에 발생하는 인덕턴스가 강해져 전류 출력이 더 어려워집니다. 이러한 경우 일반적으로 더 높은 전력 변압기를 사용하거나 전류 출력을 위해 인버터 변압기를 사용하는 것이 일반적입니다. 그림 2-17과 같이 전극 마모를 기준으로 용접 클램프의 크기를 선택합니다.
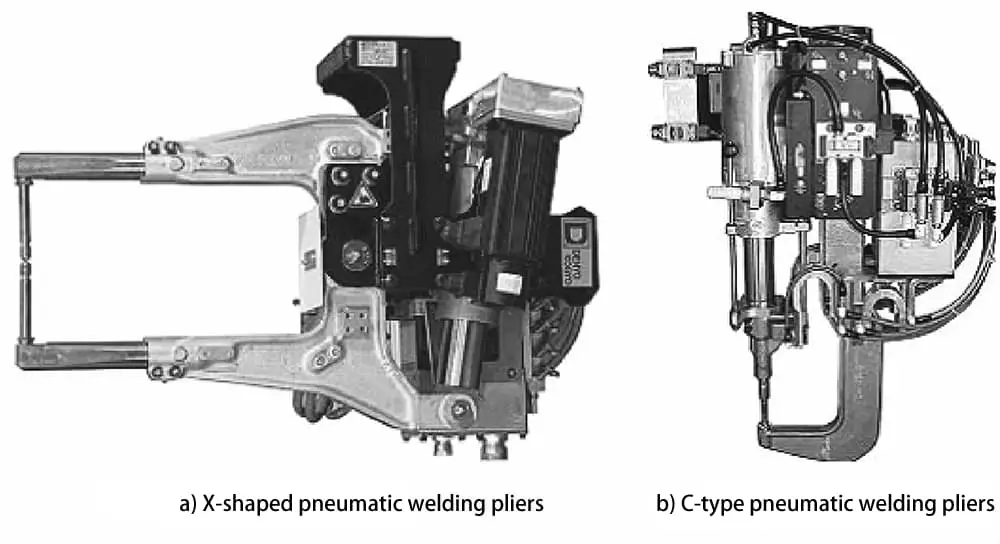
a) X형 공압 용접 집게
b) C형 공압 용접 집게
스폿 용접 로봇은 일반적으로 그림 2-18과 같이 로봇 본체, 로봇 제어 장치, 티치 펜던트, 스폿 용접 집게, 용접 시스템으로 구성되며, 그림 2-18의 각 구성 요소 이름은 표 2-7에 나와 있습니다.
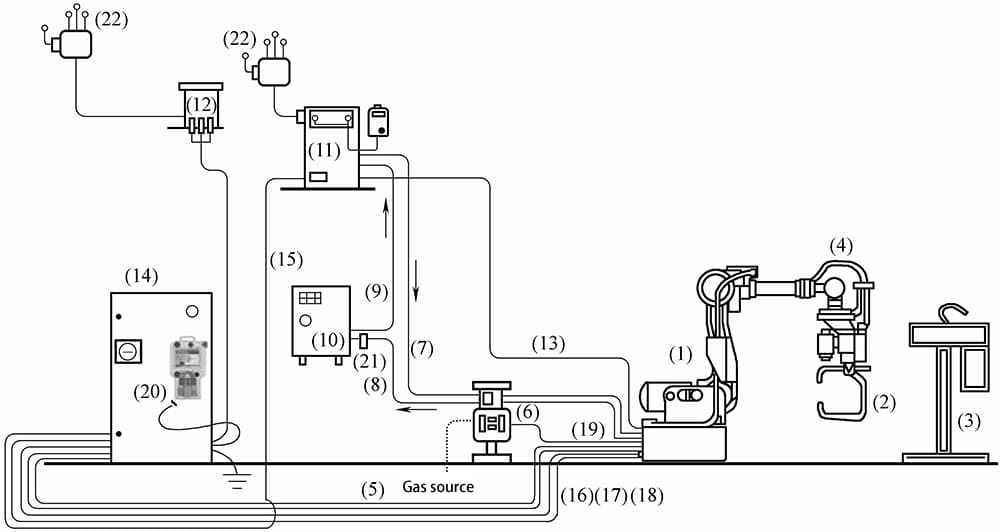
표 2-7 스폿 용접 로봇 시스템의 다양한 구성 요소 이름
| 번호 | 이름 | 번호 | 이름 |
| 1 | 로봇 본체(ES165D/ES200D)★★ | 12 | 로봇 트랜스포머★ |
| 2 | 서보/공압 스폿 용접 집게 | 13 | 집게 전원 공급 케이블☆ |
| 3 | 전극 연삭기 | 14 | 로봇 제어 캐비닛(DX100)★ |
| 4 | 손목 장치 케이블(GISO) | 15 | 스폿 용접 지시 케이블(I/F)◇◇ |
| 5 | 집게(공압/서보) 제어 케이블 SI | 16 | 로봇 전원 공급 케이블 2BC★ |
| 6 | 공기/물 파이프 어셈블리☆ | 17 | 로봇 전원 공급 케이블 3BC★ |
| 7 | 집게 냉각수 파이프◇◇ | 18 | 로봇 제어 케이블 1BC★ |
| 8 | 집게 리턴 수도관◇ | 19 | 집게 입구 공기 파이프☆ |
| 9 | 스폿 용접 컨트롤 박스 냉각수 파이프 | 20 | 로봇 티치 펜던트(PP)★ |
| 10 | 칠러☆ | 21 | 냉각수 흐름 스위치☆ |
| 11 | 스폿 용접 컨트롤 박스◇ | 22 | 전원 공급 장치 |
스폿 용접 로봇 시스템의 각 구성 요소의 기능은 표 2-8에 분류되어 있습니다.
표 2-8: 스폿 용접 로봇 시스템의 각 구성 요소별 기능 분류
| 카테고리 | 장비 코드(그림 2-18 참조) | 기능 설명 |
| 로봇 관련 | (1), (4), (5), (13), (14), (15), (16), (17), (18), (20) | 일본 야스카와에서 도입한 로봇과 다른 장비 간의 연결을 설정합니다. |
| 스폿 용접 관련 | (2), (3), (11) | 스팟에서 제공하는 스팟 용접 조건을 구현합니다. 용접 장비 제조업체 |
| 가스 공급 시스템 | (6), (19) | 공압 용접 집게를 사용할 때만 사용되는 용접 집게의 압력 실린더는 시스템 설계자가 제공한 스폿 용접 압력을 완성합니다. |
| 물 공급 시스템 | (7), (8), (9), (10), (21) | 시스템 설계자가 제공한 냉각 장비 (2) 및 (11)에 사용됩니다. |
| 전원 공급 시스템 | (12), (22) | 시스템 전원 |
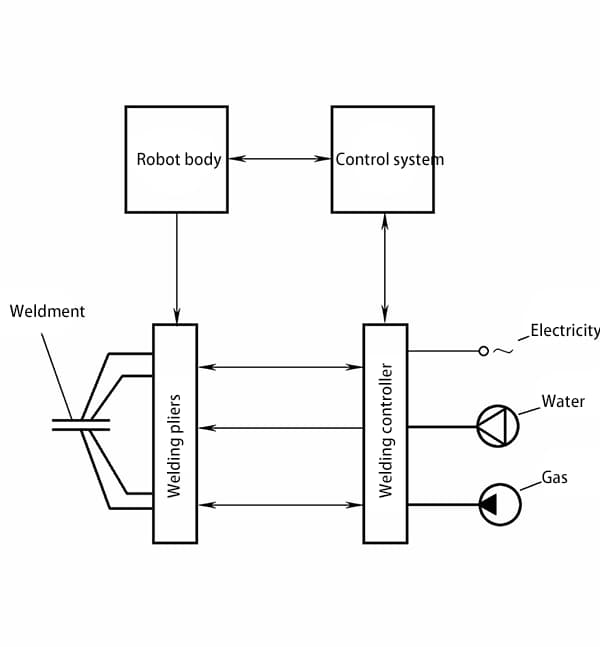
용접 시스템은 주로 용접 컨트롤러(타이머), 용접 집게(저항 용접 변압기 포함), 물, 전기, 가스 등의 보조 부품으로 구성됩니다. 시스템 구성과 원리는 그림 2-19에 나와 있습니다.
저항 용접 변압기와 용접 집게의 구조적 관계에서 용접 집게는 분리형, 내장형, 일체형의 세 가지 형태로 나눌 수 있습니다.
(1) 별도의 용접 집게
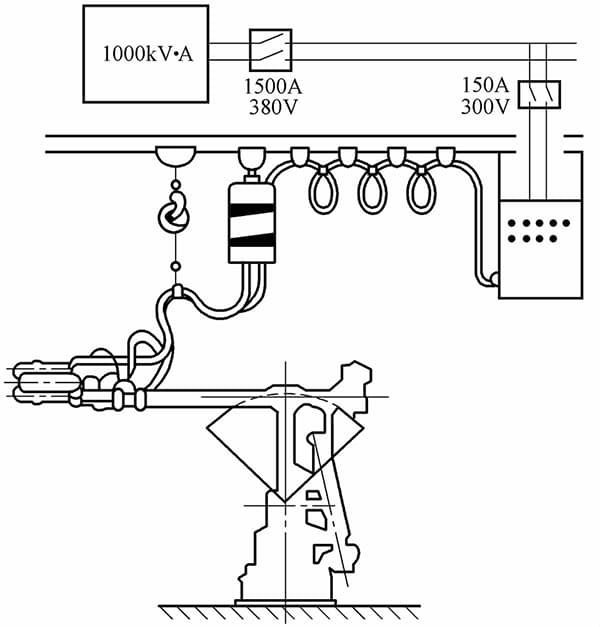
이 집게의 특징은 저항 용접 변압기가 집게 본체와 분리되어 있다는 점입니다. 통 본체는 로봇 팔에 장착되어 있고 용접 변압기는 로봇 위에 매달려 있으며 로봇의 손목 방향을 따라 트랙에서 움직일 수 있습니다. 이 둘은 보조 케이블로 연결됩니다. 그림 2-20과 같이 로봇의 부하 감소, 빠른 이동 속도, 비용 절감 등의 장점이 있습니다.
별도의 용접 집게의 가장 큰 단점은 대용량 용접 변압기가 필요하기 때문에 전력 소비가 높고 에너지 효율이 낮다는 점입니다. 또한 큰 보조 케이블은 로봇 팔에 인장력과 비틀림력을 유발하여 스폿 용접 작업 영역과 위치 선택에 제한을 줍니다. 별도의 용접 집게는 일반 서스펜션 용접 집게와 저항 용접 변압기를 사용할 수 있습니다.
그러나 2차 케이블은 일반적으로 절연 층으로 분리된 두 개의 도체로 구성되며, 각 도체는 수냉을 위해 속이 비어 있는 특수 제조가 필요합니다. 또한 케이블은 어느 정도 유연성이 있어야 합니다.
(2) 내장형 용접 집게
이 구조에서 저항 용접 변압기는 로봇 암 내부에 가능한 한 통 본체와 가깝게 배치됩니다. 변압기의 보조 케이블은 내부에서 움직일 수 있습니다. 이 형태의 용접 집게를 사용할 때는 로봇 본체와 함께 설계해야 합니다. 또한 극좌표 또는 구좌표 스폿 용접 로봇도 이 구조를 채택할 수 있습니다.
장점은 2차 케이블이 짧아지고 변압기의 용량을 줄일 수 있다는 것이지만 로봇 본체의 설계가 복잡해집니다. 임베디드 용접 통 스폿 용접 로봇은 그림 2-21에 나와 있습니다.
(3) 일체형 용접 집게
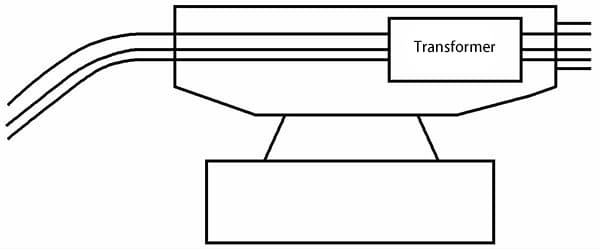
소위 일체형 용접 집게는 저항 용접 변압기와 집게 본체를 함께 장착한 다음 로봇 팔 끝의 플랜지에 함께 고정하는 방식입니다. 주요 장점은 부피가 큰 보조 케이블과 매달린 변압기의 작업 프레임을 제거할 수 있다는 점입니다. 용접 변압기의 출력 끝이 용접 집게의 상부 및 하부 암에 직접 연결되어 에너지를 절약할 수 있습니다.
예를 들어, 출력 전류가 12000A인 경우 별도의 용접 통에는 75kVA 변압기가 필요하지만 일체형 용접 통에는 25kVA만 필요합니다. 일체형 용접 통의 가장 큰 단점은 무게와 크기가 크게 증가하여 로봇 본체가 60kg 이상의 하중을 견뎌야 한다는 점입니다.
또한 로봇의 활성 손목에 용접 집게의 무게로 인해 발생하는 관성력으로 인해 과부하가 발생할 수 있으므로 설계 시 용접 집게의 무게 중심이 로봇 팔의 축에 최대한 가깝게 위치해야 합니다. 저항 용접 변압기의 설계는 일체형 용접 집게의 주요 문제입니다.
변압기는 용접 집게의 작은 공간에 갇혀 있기 때문에 크기와 무게가 평소보다 작아야 하며, 2차 코일도 수냉이 필요합니다.
현재 진공 에폭시 주조 공정을 사용하여 제조된 소형 통합 저항 용접 변압기가 사용됩니다. 예를 들어, 30kVA 변압기의 크기는 325×135×125mm³이고 무게는 18kg에 불과합니다. 일체형 용접 통 스폿 용접 로봇은 그림 2-22에 나와 있습니다.
용접(스폿 용접) 컨트롤러의 작동 원리는 용접 중인 공작물에 입력되는 2차 전류 및 전압과 공작물의 금속 용융 상태로부터 얻은 해당 임피던스 변화 값을 감지하는 것입니다.
이 정보는 로봇 컨트롤러에 피드백되어 계산을 통해 가장 적합한 용접 전류를 출력하고 각 스폿의 용접 전류를 저장하여 다음 스폿의 용접 파라미터 설정에 참고할 수 있도록 합니다. 이러한 유형의 저항 용접 컨트롤러는 용접 공정 중 스플래시를 제어하여 용접 품질을 보장할 수 있으며 전극의 프론트 엔드 크기를 자동으로 관리할 수도 있습니다.
컨트롤러는 미리 정해진 용접 모니터링 프로그램에 따라 스폿 용접 중 용접 파라미터 입력을 완료하고 스폿 용접 프로그램을 제어하며 용접 전류를 제어하고 용접 시스템 오류를 진단하며 메인 컴퓨터 및 티치 펜던트와의 통신을 설정합니다. 일반적으로 사용되는 스폿 용접 컨트롤러는 주로 다음 세 가지 구조적 형태를 가지고 있습니다.
(1) 중앙 집중식 구조 유형
이 유형에서는 용접 제어부가 로봇의 메인 제어부와 동일한 제어 캐비닛에 모듈로 배치되어 메인 컴퓨터에서 일괄 관리하며 용접 모듈에 데이터를 제공하고 용접 공정 제어는 용접 모듈에서 완료합니다. 이 구조의 장점은 높은 통합성과 통합 관리가 용이하다는 점입니다.
(2) 탈중앙화 구조 유형
분산형 구조 타입은 용접 컨트롤러와 로봇의 메인 제어 캐비닛이 분리되어 있으며, 이 둘은 응답형 통신을 통해 통신합니다. 메인 컴퓨터가 용접 신호를 제공하면 용접 컨트롤러가 독립적으로 용접을 제어하고, 용접이 완료되면 메인 컴퓨터로 종료 신호를 보내 로봇의 움직임을 제어합니다.
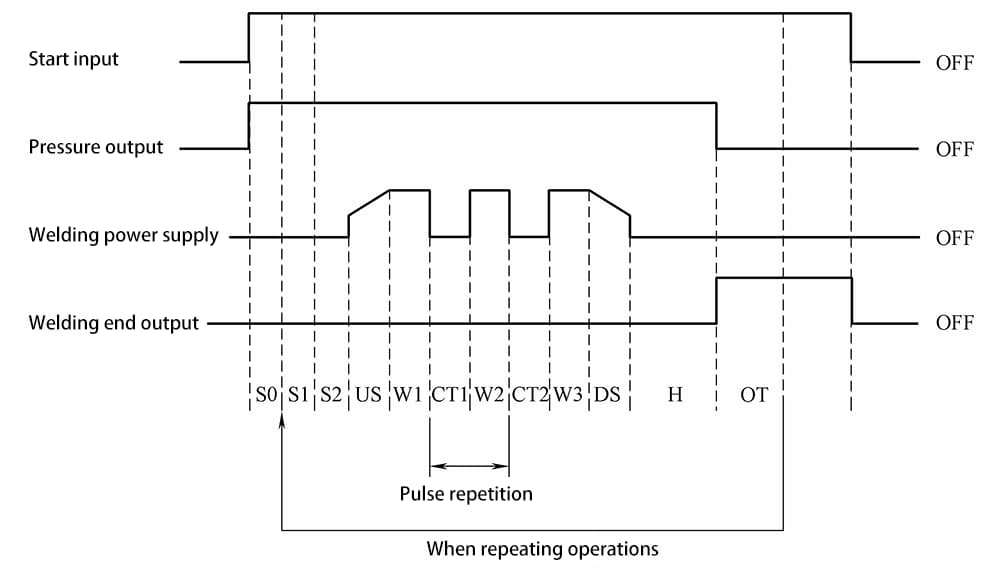
이 구조의 장점은 유연한 디버깅이 가능하고 용접 시스템을 독립적으로 사용할 수 있지만 일정 거리 이상의 통신이 필요하며 중앙 집중식 구조 유형만큼 통합성이 높지 않다는 점입니다. 분산형 구조 유형의 용접 주기는 그림 2-23에 나와 있습니다.
(3) 그룹 제어 시스템
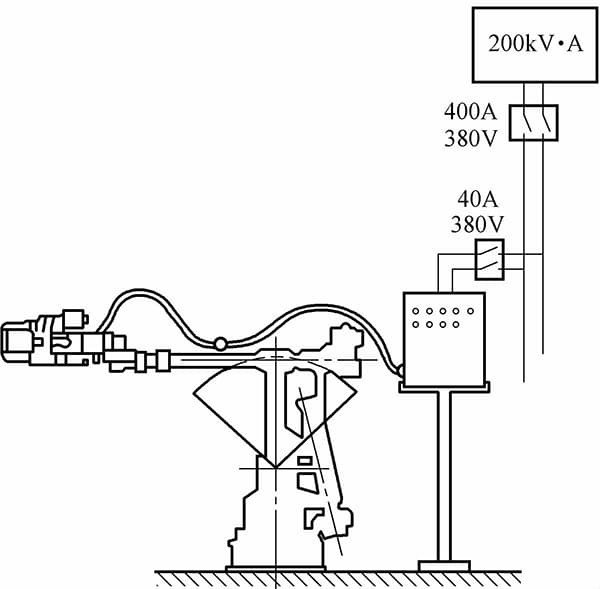
그룹 제어 시스템은 여러 대의 스폿 용접 로봇(또는 기존 용접기)을 그룹 제어 컴퓨터에 연결하여 동시에 전원이 공급되는 여러 장치를 제어함으로써 여러 대의 스폿 용접 로봇의 용접 전류를 시간 분할 제어하고 전력망의 순간 부하를 제한하며 전력망 전압을 안정화하여 용접 품질을 보장합니다.
그룹 제어 시스템은 작업장의 전원 공급 변압기 용량을 크게 줄일 수 있습니다. 또한 로봇(또는 스폿 용접기)에 고장이 발생하면 그룹 제어 시스템은 백업 스폿 용접 로봇을 시작하거나 나머지 로봇에 작업을 재할당하여 정상적인 용접 생산을 보장합니다.
그룹 제어의 요구를 충족하기 위해 스폿 용접 로봇 용접 시스템은 "용접 요청" 및 "용접 허가" 신호를 추가하고 그룹 제어 컴퓨터와 연결해야 합니다.
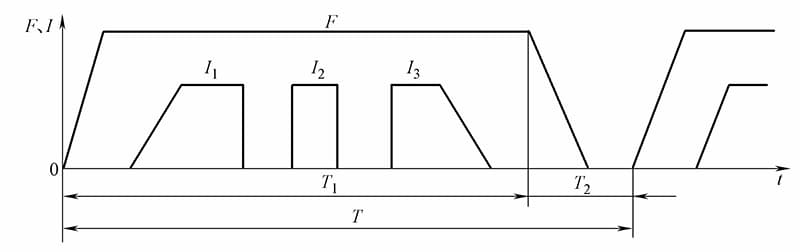
참고: T1 용접 컨트롤러를 제어하고, T2 는 로봇의 메인 컴퓨터에 의해 제어되며, T는 용접 주기를, F는 전극 압력을, I는 용접 전류를 나타냅니다.
1) 부동 압력 장치가 있는 특수 용접 집게를 사용해야 하며, 일반 용접 집게도 개조할 수 있습니다. 용접 집게는 가볍고 길고 짧은 두 가지 유형의 스트로크가 있어야 빠른 용접, 드레싱, 전극 교체 및 장애물 극복을 용이하게 할 수 있습니다.
2) 바디형 용접 집게의 무게 중심은 고정 플랜지의 축을 기준으로 설계해야 합니다.
3) 용접 제어 시스템은 저항 용접 변압기 과열, 사이리스터 과열로 인한 단락 또는 개방 회로, 공기 네트워크 전압 손실, 과도한 계통 전압 및 전극 고착과 같은 결함에 대해 자체 진단 및 자체 보호 할 수 있어야합니다. 호스트에게 중단을 알리는 것 외에도 오류 유형도 표시해야 합니다.
4) 분산 구조 타입의 제어 시스템은 로봇 본체와 티칭 펜던트로부터 다양한 신호를 파악하고 그에 따라 대응할 수 있는 통신 인터페이스를 갖춰야 합니다.
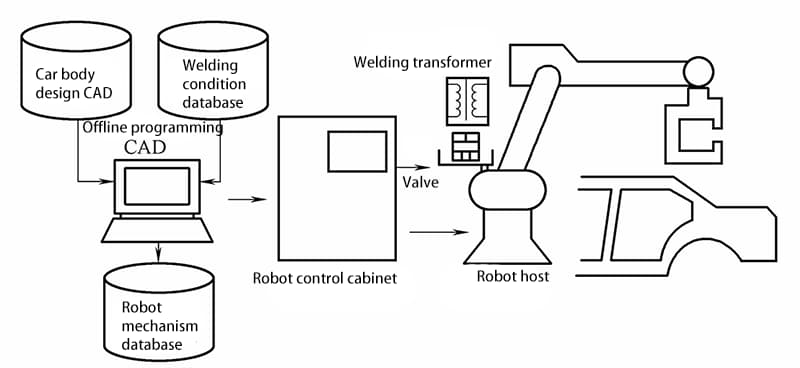
스폿 용접 로봇이 CAD 시스템과 통신할 수 있는 경우 오프라인 티칭을 수행할 수 있습니다. CAD 및 용접 데이터베이스 시스템을 갖춘 스폿 용접 로봇을 위한 오프라인 티칭 시스템의 기본 구성은 그림 2-24에 나와 있습니다.
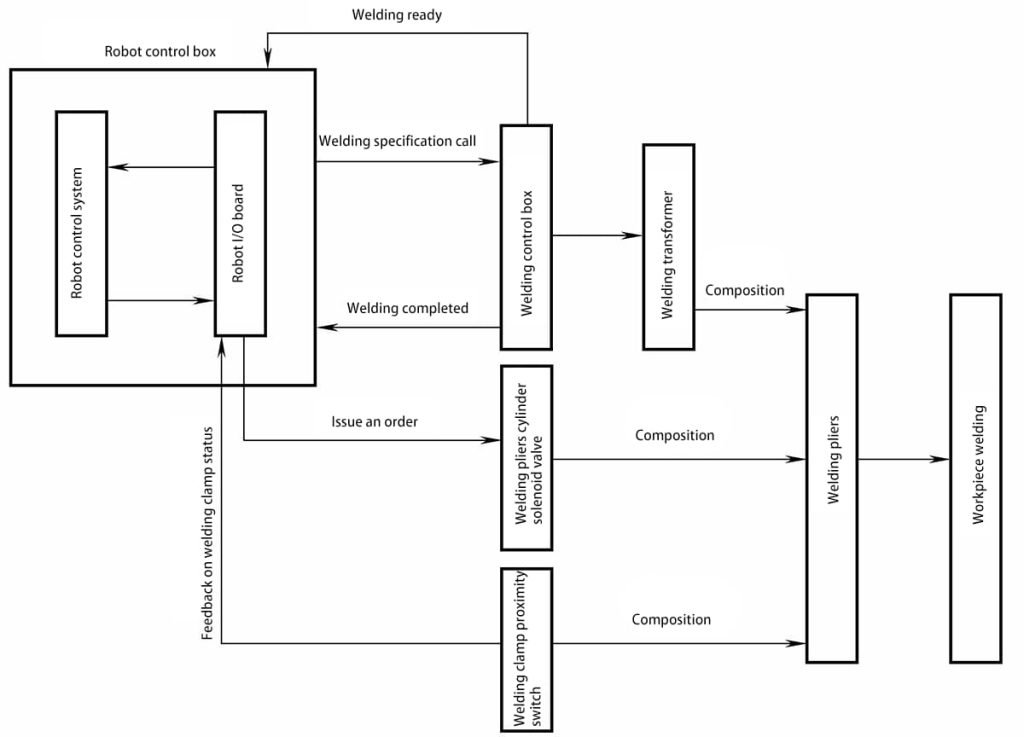
스폿 용접 로봇이 작동하면 메인 제어 시스템이 로봇의 학습된 위치를 확인합니다. 그런 다음 로봇의 I/O 보드에 있는 출력 포트를 통해 용접 집게를 닫으라는 명령을 내립니다. 실린더용 솔레노이드 밸브 코일에 24V DC로 전원이 공급되어 작동이 시작됩니다. 압축 공기가 실린더로 유입되어 피스톤 로드가 변위됩니다.
실린더의 변위 정보는 주로 효과적인 피드백을 위해 위치 근접 스위치에 의해 제공됩니다. 이 정보는 로봇의 메인 제어 시스템으로 다시 전달되고, 메인 제어 시스템은 로봇의 I/O 보드를 통해 용접 컨트롤 박스로 용접 명령을 보냅니다. 용접 컨트롤 박스는 다시 로봇의 I/O 보드로 용접 준비 신호를 보내고, 이 신호는 다시 메인 제어 시스템으로 전달됩니다.
메인 제어 시스템은 16가지 표준에 해당하는 8421 코드를 사용하여 표준 번호 호출 명령을 내립니다. 용접 컨트롤 박스는 미리 저장된 표준 코드를 활성화하여 용접 공정에 필요한 용접 시간과 전류를 출력합니다. 용접이 완료되면 용접 컨트롤 박스는 용접 프로세스가 끝났음을 알리는 신호를 보냅니다.
로봇의 메인 제어 시스템이 이 신호를 확인한 후 I/O 보드의 출력 포트를 통해 용접 집게를 열라는 명령을 보냅니다. 실린더의 솔레노이드 밸브의 전원이 차단되고 밸브 코어가 리셋되며 실린더가 역방향으로 공기를 흡입하고 실린더에 설치된 근접 스위치에 의해 집게의 열린 위치가 잠깁니다.
이 정보는 그림 2-25와 같이 로봇의 주 제어 시스템으로 피드백되어 로봇의 모션 시스템으로 이동 정보를 전송합니다.
용접 통 변압기는 스폿 용접 프로세스를 위해 용접 통 전극에 전류를 공급하고, 스폿 용접 컨트롤러("타이머"라고도 함)는 일반적으로 주파수로 설정된 스폿 용접 프로세스의 각 단계의 지속 시간을 제어하는 장치입니다.
예를 들어 PH5-7003 모델 스폿 용접 컨트롤러는 사이리스터 동기 위상 제어 기능을 갖추고 있으며 용접 전류 피드백, 전류 스텝업 기능, 다양한 모니터링 및 알람 기능을 기반으로 정전류 제어를 제공합니다.
미리 정해진 용접 모니터링 프로그램에 따라 용접 파라미터 입력, 스폿 용접 프로그램 제어, 용접 전류 제어, 용접 시스템 고장 자가 진단을 완료할 수 있습니다.
용접 컨트롤러와 본체 및 티칭 박스를 연결하는 주요 신호에는 용접 전류 증가/감소, 용접 시간 조정, 용접 시작 및 종료, 용접 시스템 결함에 대한 정보가 포함됩니다. 제어 타이밍 다이어그램은 그림 2-26에 나와 있습니다.
전극 연마기라고도 하는 전극 드레서는 스폿 용접 작업에서 필수적입니다. 전극을 통과하는 높은 전류 밀도와 상당한 압력으로 인해 전극은 종종 변형되어 원래 모양을 잃게 됩니다. 이러한 변형은 용접 너겟의 크기 제어에 악영향을 미칩니다.
또한 용접 중 고온으로 인해 전극과 차체 패널 사이에 합금 및 산화 반응이 일어나 전극의 전도도가 손상될 수 있습니다. 일관된 용접 품질을 보장하려면 전극 드레서를 사용하여 전극을 정기적으로 드레싱하는 것이 중요합니다. 전극 드레서에는 수동과 자동의 두 가지 유형이 있습니다. 다음 절차는 수동 드레싱 작업의 관리를 안내합니다:
(1) 전극은 다음 조건에서 옷을 입어야 합니다:
a) 전극 가장자리가 닳았거나 끝면 직경이 8mm를 초과하는 경우.
b) 전극의 접촉 끝 지름이 6mm 미만인 경우.
c) 전극 표면이 고르지 않거나 눈에 띄는 구덩이가 있거나 너무 뾰족한 경우.
d) 상부 및 하부 전극이 잘못 정렬되어 드레싱을 해도 원하는 효과를 얻을 수 없는 경우 전극을 적절히 조정합니다.
(2) 수동 전극 드레싱 방법:
용접/조절 스위치를 설정하여 조정합니다. 전극의 측면을 먼저 드레싱한 다음 끝면을 드레싱합니다. 드레싱 후 시험판에서 테스트 용접을 수행하여 용접 품질과 드레싱된 전극의 상태를 검사합니다.
(3) 전극 캡 드레싱 및 교체 시 고려 사항:
a) 위쪽과 아래쪽 접촉면이 대칭을 이루며 편차가 0.5mm를 넘지 않도록 합니다.
b) 상단과 하단의 접촉면은 틈이 없이 평평해야 합니다.
c) 전극의 접촉면은 너무 작거나 너무 커서는 안 되며, 접촉면 직경을 6mm에서 8mm 사이로 유지하고 테이퍼는 45° 이상으로 상황에 따라 적절히 조정해야 합니다.
d) 새 전극 캡으로 교체할 때는 돌출부나 움푹 들어간 곳이 없이 표면이 매끄러워야 합니다.
로봇 스폿 용접 시스템에서는 일반적으로 자동 드레서가 사용됩니다. 로봇 전극 드레싱의 원리는 다음과 같습니다. 로봇이 설정된 용접 횟수에 도달하면 드레싱 프로그램이 자동으로 시작됩니다. 예를 들어 일반 탄소강 소재를 용접할 때는 800~1000번 용접할 때마다 전극 캡을 드레싱해야 우수한 용접 품질을 보장할 수 있습니다.
용접 건 전극은 드레서의 연삭 휠의 양쪽으로 이동하여 상부 및 하부 전극을 고정하여 드레서의 양면 블레이드에 동시에 접촉합니다. 그라인딩 휠이 정해진 횟수만큼 회전한 후 상부 및 하부 전극 팁이 칼날 모양에 맞게 절단됩니다. 전극 드레서와 그라인딩 휠은 회전 유형에 따라 단방향 회전과 양방향 회전으로 분류됩니다.
연삭 휠은 절삭 날의 수에 따라 싱글 엣지 및 멀티 엣지 유형으로 다시 분류됩니다. 자동 전극 드레서의 외관은 표 2-9a에 나와 있습니다.
압력 테스터는 용접 건의 가압 상태를 확인하는 데 사용되는 기기입니다. 일반적으로 표 2-9b에 표시된 것처럼 용접 건에 가해지는 압력을 주기적으로 테스트하는 데 사용됩니다.
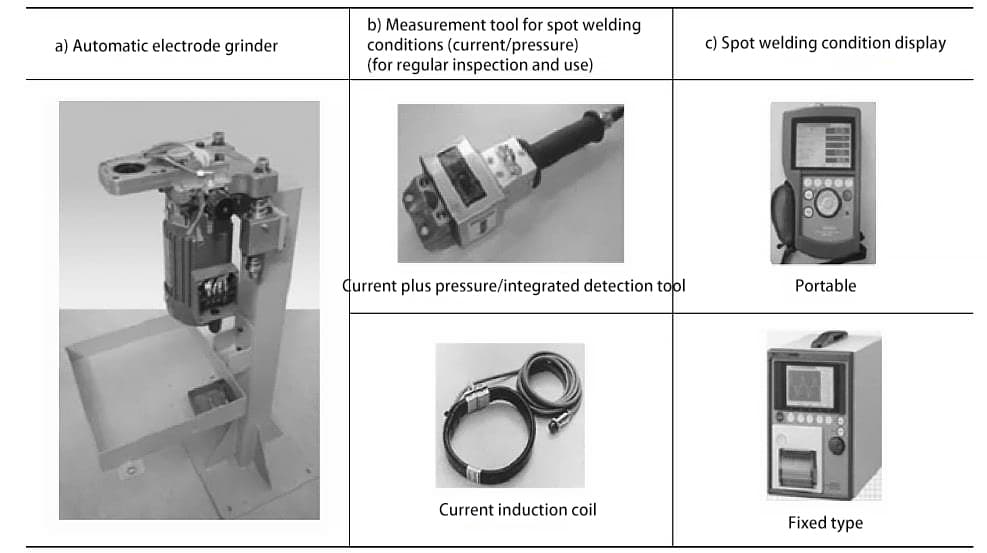
전류 감지기는 스폿 용접의 품질을 제어하는 데 사용되는 기기입니다. 스폿 용접 컨트롤러의 전류 출력을 주기적으로 확인하고 생산 중에 모든 용접 지점의 전류를 실시간으로 모니터링하는 데 사용할 수 있습니다. 또한 표 2-9c에 표시된 것처럼 스폿 용접 중 전류 판독값을 제공합니다. 참고: 스폿 용접 중 전류와 용접 집게의 가해지는 압력은 중요한 요소입니다.
시스템 캘리브레이션을 시작할 때 작업자는 용접 장비의 전류 및 압력 조건을 철저히 테스트하여 후속 작업이 원활하게 진행될 수 있도록 해야 합니다.