Tutorial completo de corte fino: Guia passo-a-passo
Imagine uma técnica de conformação de metais tão precisa que transforma a matéria-prima em componentes intrincados com uma precisão inigualável. Bem-vindo ao...
Está pronto para levar os seus projectos de automação para o nível seguinte, dominando a configuração de um servo driver? Quer seja um amador intermédio ou um profissional que procura aperfeiçoar as suas competências, este tutorial passo-a-passo abrangente irá guiá-lo ao longo de todo o processo. Desde a compreensão dos componentes essenciais e a preparação do seu espaço de trabalho, até à ligação do seu servomotor e à sua integração com um PLC, temos tudo o que precisa. Iremos aprofundar os pormenores da configuração, assegurando que o seu servomotor funciona de forma suave e eficiente. No final deste guia, não só saberá como ligar um servomotor a um servomotor, mas também como resolver problemas comuns de configuração. Pronto para mergulhar e desbloquear todo o potencial dos seus sistemas servo? Vamos começar!
Os servo controladores desempenham um papel vital no controlo dos servo motores, que são essenciais em aplicações como a robótica, a automação e as máquinas CNC. Convertem sinais de controlo de baixa potência em sinais de alta potência necessários para o funcionamento preciso do motor. Esta secção apresenta uma visão geral dos componentes envolvidos e os passos iniciais necessários para configurar um servo controlador.
Um servomotor tem normalmente três fios: alimentação, terra e um fio de sinal, que recebe impulsos de comando para controlar a posição, velocidade e direção do motor.
O servomotor converte os sinais de controlo de um controlador, como um PLC ou um microcontrolador, nos sinais de alta potência necessários para acionar o servomotor, garantindo um posicionamento e movimento precisos.
Nos sistemas de automação, um PLC é normalmente utilizado para controlar servo controladores, enviando sinais de comando precisos com base na sua lógica programada.
Uma fonte de alimentação fiável é essencial tanto para o servo condutor como para o motor. A fonte de alimentação deve corresponder aos requisitos de tensão e corrente especificados pelo servo condutor e pelo motor.
Em algumas configurações, pode ser utilizado um servoaccionamento analógico, que funciona com sinais analógicos para controlo. Este tipo de acionamento é adequado para aplicações que requerem um controlo suave e contínuo.
Antes de iniciar a instalação, reúna todas as ferramentas e materiais necessários, tais como diagramas de cablagem, conectores e equipamento de segurança. Cumpra todas as precauções de segurança para evitar riscos eléctricos e garantir uma instalação bem sucedida.
Ao compreender estes componentes e ao preparar-se adequadamente, pode avançar com confiança para ligar e configurar o seu sistema de servo controlador.
Um servo driver é um componente chave em sistemas de servo motores que converte sinais de controlo de baixa potência em sinais de alta potência para acionar o motor. Garante um controlo preciso da posição, velocidade e binário do motor, recebendo comandos de um controlador, como um PLC (Programmable Logic Controller) ou um microcontrolador, e traduzindo esses comandos em acções, ajustando a potência fornecida ao servomotor.
O servomotor é um atuador que converte sinais eléctricos em movimentos mecânicos precisos, consistindo normalmente num rotor, estator e um codificador ou resolver para feedback. O motor funciona com base nos sinais de controlo recebidos do servo condutor, permitindo um controlo preciso da posição angular ou linear, da velocidade e da aceleração. Os servomotores são normalmente utilizados em aplicações que requerem elevada precisão, como robótica, maquinaria CNC e sistemas de automação.
Um PLC é um dispositivo informático especializado utilizado em sistemas de controlo industrial para automatizar processos. Nos sistemas servo, um PLC envia sinais de controlo para o servomotor e pode ser programado para executar tarefas como a coordenação de vários motores e a resposta a entradas de sensores. Actua como o cérebro do sistema de automação, assegurando que os servomotores funcionam de forma sincronizada e eficiente.
A fonte de alimentação é um componente crucial que fornece a energia eléctrica necessária ao servo condutor e ao motor. Tem de corresponder aos requisitos de tensão e corrente especificados pelo servo condutor e pelo motor para garantir um funcionamento estável e fiável. As fontes de alimentação podem ser DC (como 24V ou 48V) ou AC, dependendo dos requisitos do servo sistema. A seleção e instalação adequadas da fonte de alimentação são essenciais para evitar problemas como quedas de tensão, sobreaquecimento e ruído elétrico.
Um servoaccionamento analógico é um tipo de servoaccionamento que funciona utilizando sinais analógicos para controlo. Ao contrário dos servoaccionamentos digitais, que utilizam protocolos de comunicação digital, os servoaccionamentos analógicos recebem sinais contínuos de tensão ou corrente para controlar o funcionamento do motor. Este tipo de acionamento é adequado para aplicações que requerem um controlo suave e contínuo, como certos tipos de maquinagem e controlo de processos. Os servoaccionamentos analógicos são frequentemente utilizados em sistemas mais antigos ou em aplicações industriais específicas em que é preferível um controlo suave e contínuo.
Antes de iniciar a instalação, reúna todas as ferramentas e materiais necessários para garantir uma montagem eficiente e sem problemas. Segue-se uma lista de verificação dos itens essenciais:
É fundamental garantir a segurança durante o processo de instalação. Siga estas diretrizes para evitar acidentes e proteger o pessoal e o equipamento:
Compreender as especificações do seu servoaccionamento, motor e componentes associados é crucial para uma instalação bem sucedida, por isso siga estes passos:
Garantir que o servoaccionamento, o motor e o controlador são compatíveis é essencial para um funcionamento sem problemas. Eis os principais aspectos a verificar:
Os servomotores são cruciais para os sistemas de automação, oferecendo um controlo preciso dos movimentos mecânicos. Um servomotor típico utilizado em aplicações amadoras e industriais possui três conectores principais:
A ligação de um servo controlador a um PLC envolve vários passos críticos para assegurar uma comunicação e um controlo perfeitos. Siga estes passos para integrar corretamente o seu servo condutor com um PLC.
Certifique-se de que tanto o servo condutor como o PLC estão desligados antes de efetuar quaisquer ligações. Esta precaução ajuda a evitar riscos eléctricos e protege os dispositivos de potenciais danos.
Recolha todos os cabos, conectores e software necessários. Os itens normalmente necessários incluem cabos de comunicação (por exemplo, Ethernet, RS-232 ou RS-485), cabos de alimentação, cabos de sinal de controlo e os manuais e diagramas de ligação do fabricante.
Consulte o diagrama de ligação específico fornecido pelo fabricante do seu PLC e servo condutor. Este diagrama ilustrará o esquema de ligações exato necessário para a sua configuração, assegurando que todas as ligações são efectuadas corretamente.
A configuração de um servomotor requer a definição de vários parâmetros para garantir que o servomotor funciona correta e eficientemente.
Selecione o modo de controlo utilizando a interface, o software ou o teclado do servoaccionamento. Consulte o manual para obter instruções específicas.
Configure o tipo de motor acedendo às definições do servoaccionamento e selecionando o tipo de motor adequado entre as opções disponíveis.
Uma fonte de alimentação estável e adequada é crucial para o funcionamento fiável do servo sistema. Certifique-se de que a fonte de alimentação corresponde aos requisitos de tensão e corrente especificados pelo servo condutor e pelo motor.
Os servoaccionamentos de corrente contínua funcionam normalmente a 24 V, 48 V ou mais, dependendo da aplicação. Os servoaccionamentos de CA requerem uma entrada de CA, normalmente 220V ou 380V, dependendo da região e da aplicação. Certifique-se de que a fonte de alimentação pode fornecer corrente suficiente para lidar com as exigências de corrente de pico e contínua do servomotor. Verifique as especificações do servoaccionamento e do motor para determinar os requisitos exactos.
A definição correta dos parâmetros é vital para o desempenho ótimo do sistema servo. Os principais parâmetros incluem:
As definições de ganho incluem Ganho Proporcional (P) para velocidade de resposta, Ganho Integral (I) para eliminar erros de estado estacionário e Ganho Derivativo (D) para estabilidade. Comece com os valores recomendados pelo fabricante e ajuste conforme necessário durante o teste.
Estas definições ajudam a proteger o motor e a garantir um funcionamento suave.
Muitos servo-drives são fornecidos com ferramentas de software para configuração e afinação avançadas. Siga as instruções do fabricante para instalar o software e ligue o seu computador ao servo-drive utilizando a interface adequada (por exemplo, USB, Ethernet). Utilize o software para ajustar parâmetros, monitorizar dados de desempenho e diagnosticar problemas.
Os testes garantem que o servo sistema funciona corretamente em condições reais de trabalho.
Efetuar os ajustes necessários à configuração com base nos resultados dos testes. Consulte sempre as diretrizes do fabricante para obter os procedimentos de teste específicos e os ajustes recomendados.
Primeiro, localize os terminais de alimentação no seu servo condutor. Estes terminais estão normalmente marcados para uma fácil identificação, tal como o terminal 35 que fornece 24 volts e outro terminal que serve como sinal de ativação.
Certifique-se de que a fonte de alimentação corresponde aos requisitos de tensão e corrente especificados pelo servo condutor e, em seguida, ligue os terminais positivo e negativo da fonte de alimentação em conformidade. Fixe todas as ligações para evitar quaisquer fios soltos, que poderiam causar falhas eléctricas.
Alguns servo drivers requerem um sinal de ativação específico para iniciar o motor. Este pode ser um sinal positivo ou negativo, dependendo do modelo. Consulte o manual do servo controlador para obter informações detalhadas sobre o sinal de ativação necessário.
Quando as ligações de alimentação estiverem seguras, envie o sinal de ativação para o terminal correto. Este sinal pode ser gerado por um PLC ou outro dispositivo de controlo. Certifique-se de que a tensão do sinal corresponde às especificações do servo condutor para evitar quaisquer danos.
Utilize o modo jog no servo driver para testar manualmente o movimento do servo motor. O modo Jog permite-lhe mover o motor de forma incremental para verificar se este responde corretamente aos sinais de controlo. Este é um passo essencial para garantir que o motor está a funcionar corretamente antes de executar sequências automatizadas.
Verifique se há indicadores como luzes verdes ou ecrãs de estado no servo condutor. Estes indicadores confirmarão se o servo condutor está pronto e operacional. Quaisquer indicadores de erro devem ser tratados imediatamente através da verificação das ligações e configurações.
Utilize os sinais de saída do seu controlador para enviar sinais de impulsos para o servo condutor. Estes impulsos determinam a posição ou a velocidade do motor. Certifique-se de que os sinais de controlo estão corretamente configurados e correspondem aos requisitos do servo condutor.
Alguns servo controladores oferecem opções para sinais de controlo de 5V ou 24V. Escolha a tensão adequada com base na sua configuração e utilize as resistências necessárias para proteção. Níveis de tensão incorrectos podem danificar o servo controlador ou o motor.
Escolha o modo que melhor se adequa à sua aplicação, como o modo de posição, velocidade ou binário, e defina o conversor em conformidade. Por exemplo, se utilizar a comunicação EtherCAT, certifique-se de que o conversor está definido para o modo correto.
Se a sua aplicação requer tabelas de posição, configure o servo driver com as definições corretas da tabela de pesquisa. Normalmente, isto pode ser feito utilizando ferramentas de software fornecidas pelo fabricante do servo controlador.
Antes de ligar o servo sistema, certifique-se de que todos os componentes estão bem fixos. Os componentes soltos podem provocar falhas mecânicas ou curto-circuitos eléctricos.
Verifique novamente se todos os níveis de tensão correspondem às especificações do seu equipamento. Níveis de tensão incorrectos podem causar danos significativos no servo condutor e no motor.
Se o servomotor não responder como esperado, verifique todas as ligações. Certifique-se de que as ligações de alimentação, terra e sinal de controlo estão seguras e corretamente alinhadas.
Consulte o manual do servo condutor para obter guias de resolução de problemas específicos do seu modelo. O manual fornecerá passos pormenorizados para diagnosticar e resolver problemas comuns.
Depois de concluir os passos de configuração e ativação, confirme que o servo condutor e o motor funcionam como pretendido. Execute uma série de testes para garantir que todos os parâmetros estão corretamente definidos e que o sistema funciona de forma fiável nas condições esperadas.
Implemente um programa de manutenção regular para verificar se o servo condutor e o motor apresentam sinais de desgaste ou danos. A manutenção regular ajuda a prolongar a vida útil do equipamento e a manter um desempenho ótimo.
Inspeccione e limpe periodicamente o servoaccionamento para remover pó e detritos.
Mantenha o firmware atualizado para garantir a compatibilidade e o desempenho ideal.
Fornecer formação aos operadores e técnicos para garantir o manuseamento e funcionamento corretos dos sistemas servo, minimizando os erros.
Se os passos de resolução de problemas não resolverem o problema, isso pode indicar um problema mais profundo de hardware ou software. Recomenda-se que contacte o fabricante do servoaccionamento ou um técnico profissional. Forneça informações detalhadas sobre a avaria, incluindo códigos de erro e condições de funcionamento, para acelerar o processo de resolução.
Seguem-se as respostas a algumas perguntas frequentes:
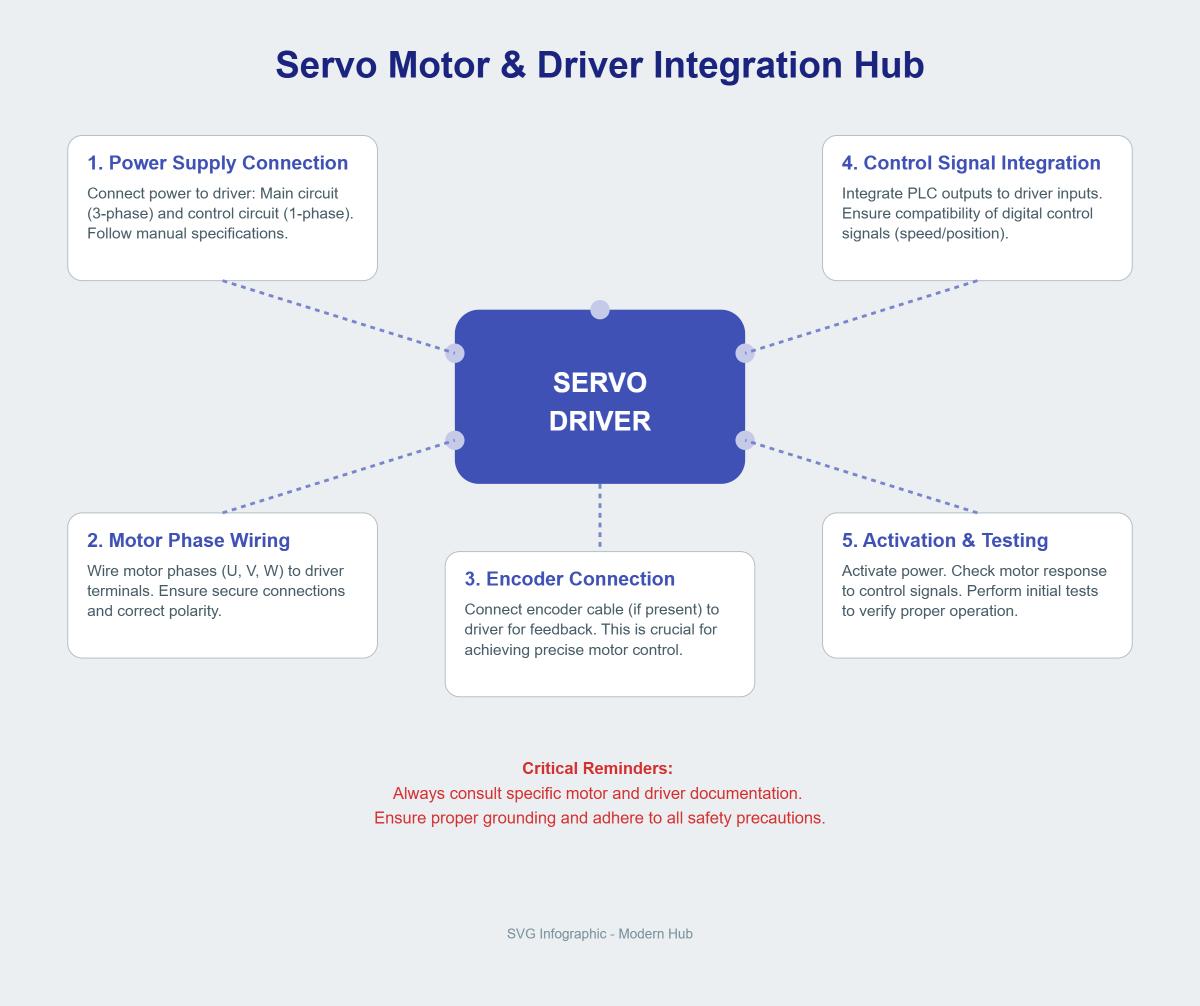
Para ligar um servomotor a um servo condutor, siga estes passos:
Consulte sempre a documentação específica do seu servomotor e servo condutor para garantir a compatibilidade e os procedimentos corretos. A ligação à terra correta e o cumprimento das precauções de segurança são essenciais.
Para configurar um servo condutor, siga estes passos:
Seguindo estes passos, pode configurar com sucesso um servo driver para o seu projeto. Consulte sempre a documentação específica para obter instruções detalhadas e precauções de segurança.
Para integrar um servo driver com um PLC, siga estes passos:
Em primeiro lugar, certifique-se de que tanto o PLC como o servoaccionamento estão desligados para evitar riscos eléctricos. Reúna todos os componentes necessários, incluindo o PLC, o servoaccionamento, os cabos de comunicação adequados e o software. Verifique se o servoaccionamento e o PLC são compatíveis, especialmente no que diz respeito a protocolos de comunicação como Ethernet, RS-232 ou RS-485.
Em seguida, ligue a fonte de alimentação a ambos os dispositivos, assegurando uma ligação à terra adequada para minimizar o ruído elétrico. Utilize o cabo de comunicação adequado para ligar a porta de comunicação do PLC à porta correspondente do servoaccionamento. Depois, ligue os sinais de saída do PLC aos terminais de entrada do servoaccionamento, normalmente para comandos de controlo como velocidade e posição.
Quando todas as ligações estiverem feitas, ligue o PLC e o servoaccionamento. Configure o software do PLC com os parâmetros de comunicação corretos, incluindo a taxa de transmissão, os bits de dados e a paridade. Escreva um programa de controlo no PLC para enviar comandos para o servoaccionamento, o que pode envolver a configuração dos modos de controlo de posição ou de controlo de velocidade. Teste a ligação enviando comandos simples para verificar se a comunicação e o controlo estão corretos.
Se surgirem problemas, verifique se todos os cabos estão seguros e corretos e reveja as definições de comunicação em ambos os dispositivos. Consulte os manuais do PLC e do servoaccionamento para obter instruções específicas de resolução de problemas. Certifique-se de que o servomotor está corretamente ligado ao servoaccionamento e verifique se as saídas do PLC são compatíveis com os requisitos de entrada do servoaccionamento.
Seguindo estes passos, é possível integrar com sucesso um servo driver com um PLC, assegurando um controlo preciso e fiável do servo motor.
Os problemas mais comuns na instalação de um servo condutor resultam frequentemente de erros de cablagem, configuração incorrecta e problemas de alimentação. Uma cablagem solta ou incorrecta pode fazer com que o servomotor não rode ou gere ruídos anormais. Certifique-se de que todas as ligações estão seguras e siga corretamente a fase do motor, especialmente no caso de motores trifásicos. Os problemas de sobreaquecimento podem surgir devido a sobrecargas ou definições incorrectas; verifique a carga e reveja os parâmetros do controlador para garantir que estão corretamente definidos. Os erros de comunicação entre o servo condutor e o PLC podem resultar de uma cablagem defeituosa ou de definições incompatíveis, exigindo a inspeção das ligações e actualizações de software. Os erros de sobrecorrente, sobretensão ou subtensão indicam normalmente problemas na fonte de alimentação ou definições incorrectas; meça a tensão e a corrente nos terminais do motor e reveja a configuração. A manutenção regular e a documentação de quaisquer alterações nas definições ou na cablagem podem ajudar a prevenir e a resolver rapidamente estes problemas comuns.